ライントレース・ロボット解説

ライントレース・ロボットが完成したので情報をまとめてアップしておきます。
このロボット製作はロボコン部の部員に教育するための教材開発を目的でした。そのため以下のことを考慮して設計しました。
- 作り易いメカと回路
- kumaduinoを使用する
- 電池の本数を少なくする
kumaduinoは、metaboard/arduinoコンパチの秋月C基板サイズのマイコンボードでロボコン部のarduino講習でも使用しているので部に在庫が豊富にあります。秋月のC基板をそのまま拡張基板として使えるのも便利です。
arduinoを16MHzのまま使用するには5Vの電源が必要です。これを1.2Vの充電池とレギュレータで賄おうとすると4本では4.8Vで足りないので6本必要になります。本数が増えるとお金もかかりますし充電も面倒です。そこで今回はHT7750を使用して2本2.4Vを5Vに昇圧して使用することにしました。ちなみにインダクタL1にはアキシャルリード型の100uH44mAのものでもいけそうだったのですが、電流が増えたり入力電圧が下がったりすると苦しそうだったので、手持ちのSMD型47uH360mAを使ってみました。

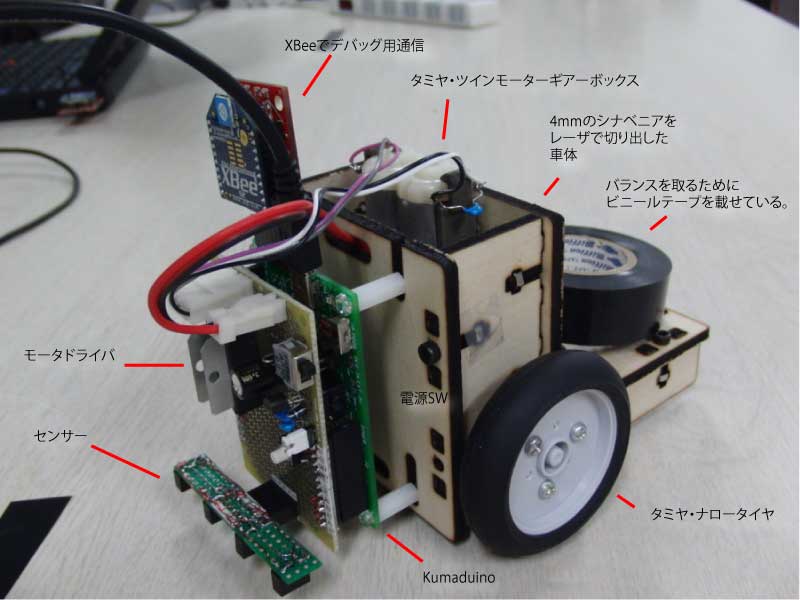 (説明付き) (説明付き) |
 背面 背面 |
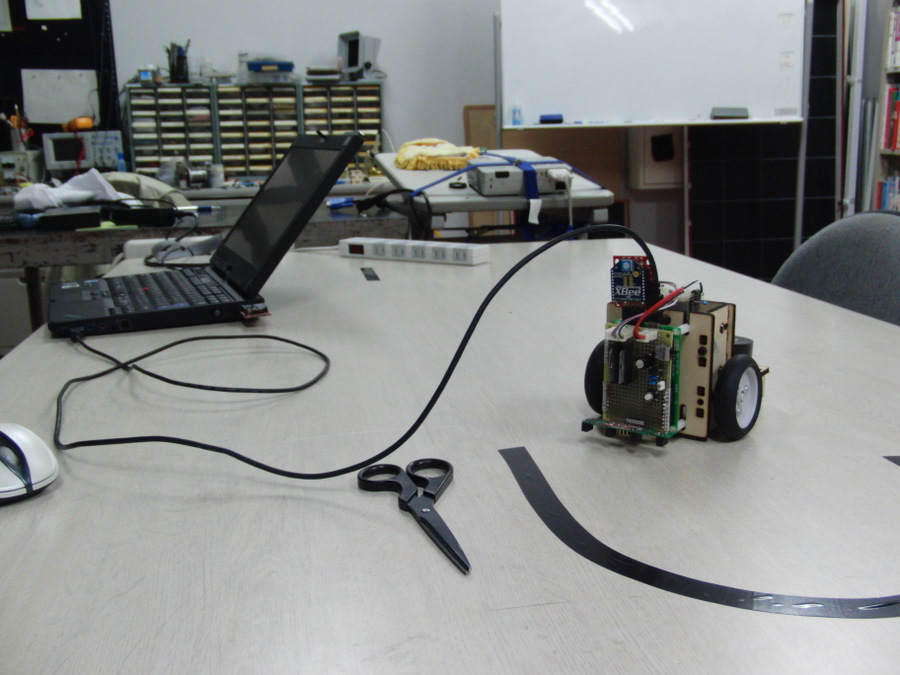 プログラム中 プログラム中 |
良かった点
- 昇圧回路はうまく機能し単3電池2本で問題なく使用できた。
- kumaduinoにXBeeが簡単につながり、デバッグに使用できた。
改善すべき点
- センサの取り付け方にこだわって基板を前面につけたためバランスが悪い。素直に上面につけるべきだった。
このライントレースロボットを使って本当にロボコン部の教育を行うかどうかまだがからないが、充分教育に使用できる題材ができて良かったです。
Comment-
ライントレース2号とCNC | うだうだブログ (Geek向け) より:
2011年9月8日木曜日 23:14
[…] ライントレース2号とCNC 投稿日: 2011年9月8日 作成者: nari 夏ロボコンも近づいたので、ライントレースの高速バージョンを作成し、学生に範を示そうかと考える。 […]