geek向け
2011年3月4日金曜日 Category - メカ Tag - レーザー加工機,六足ロボット Comment : 0
Tag : レーザー加工機, 六足ロボット
メールアドレスが公開されることはありません。
コメント
名前
メール
サイト
次回のコメントで使用するためブラウザーに自分の名前、メールアドレス、サイトを保存する。
 切り出し
切り出し 足1本
足1本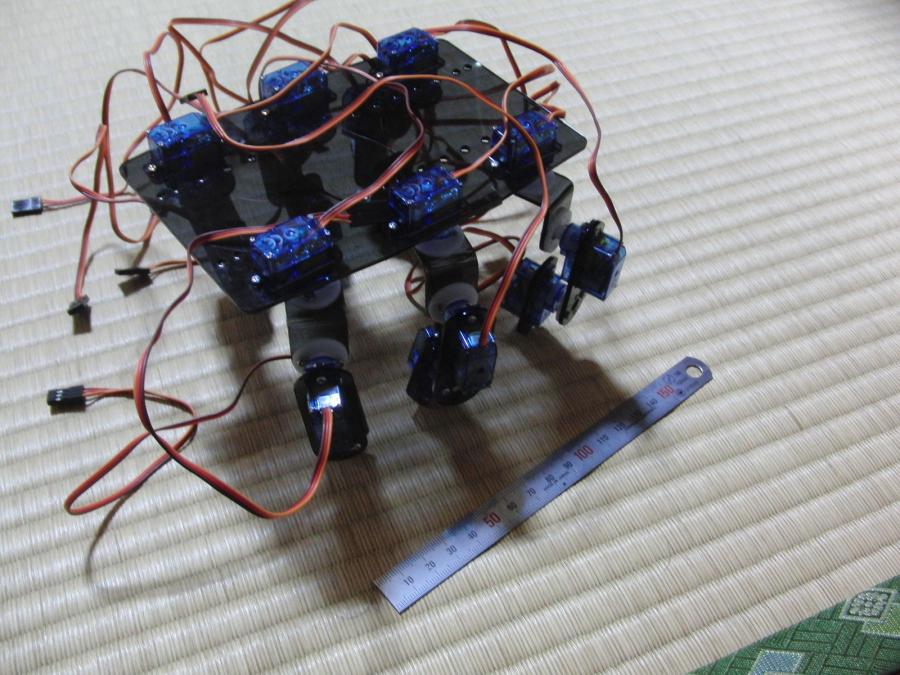 全体像
全体像
最近のコメント