ライントレース・ロボット2014
ロボコン部が、なかなか自動機のプログラムを作れるようにならないので組込みプログラミング教育の必要性を感じている。それと新入部員の講習の教材も兼ねて、3年前に作ったライントレース・ロボット若干作り直すことにした。
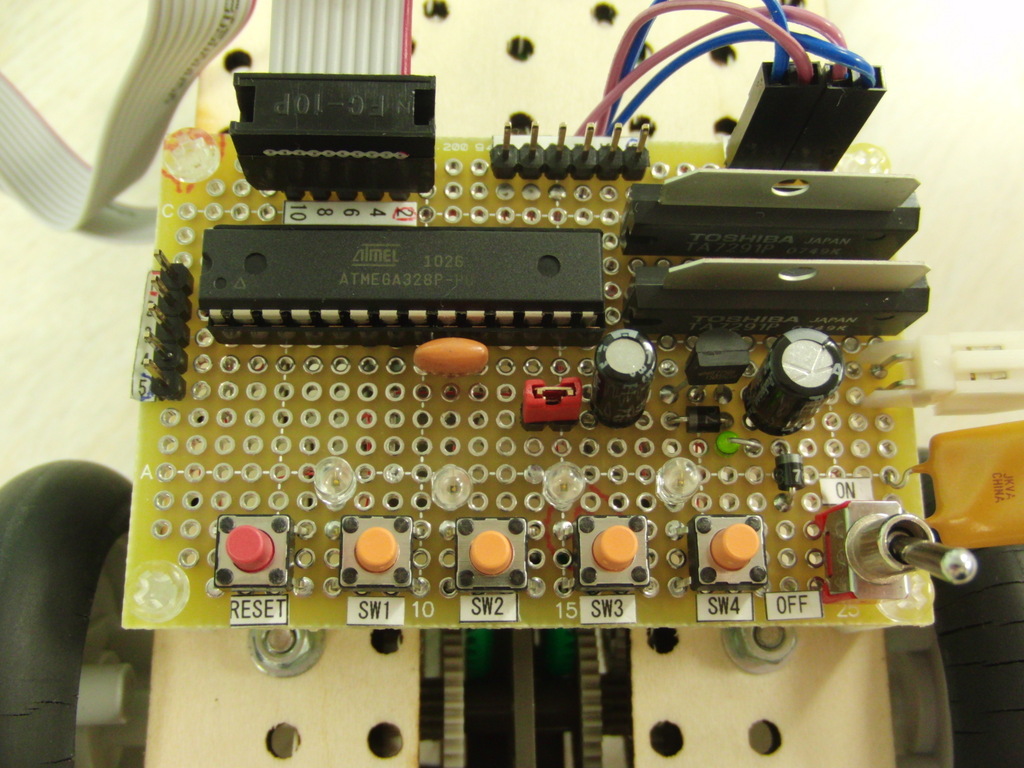
改造の主眼は、プログラミングの教材として使いやすいように、入出力を増やすこと。と言っても以前はスイッチ1個、LED1個しかついていなかったのを信号線を共用にし4個づつに増やした。スグには使わないが、あとキャラクタLCDもつけたかったので、I2C接続のLCDを搭載可能なように端子を出した。I2C端子で他にもいろいろ拡張できるかもしれない。
回路はkumaduino(arduino互換)+Cタイプユニバーサル基板のシールドにモータドライバーや昇圧回路を実装したもので作っていたが、今回はarduinoとモータドライバー等をまとめてCタイプ基板1枚に入れた。新入部員の1年生に、これをユニバーサル基板で自由に作らせると手に負えないので、実体配線図を用意し、部品の配置を指定した。この回路なら、ちょっとやそっと配線を間違えても、燃やされない限り修理可能だと思う。 電源グランド・ショートや逆刺しで、燃やされる可能性は十分あるので、ポリスイッチも追加。
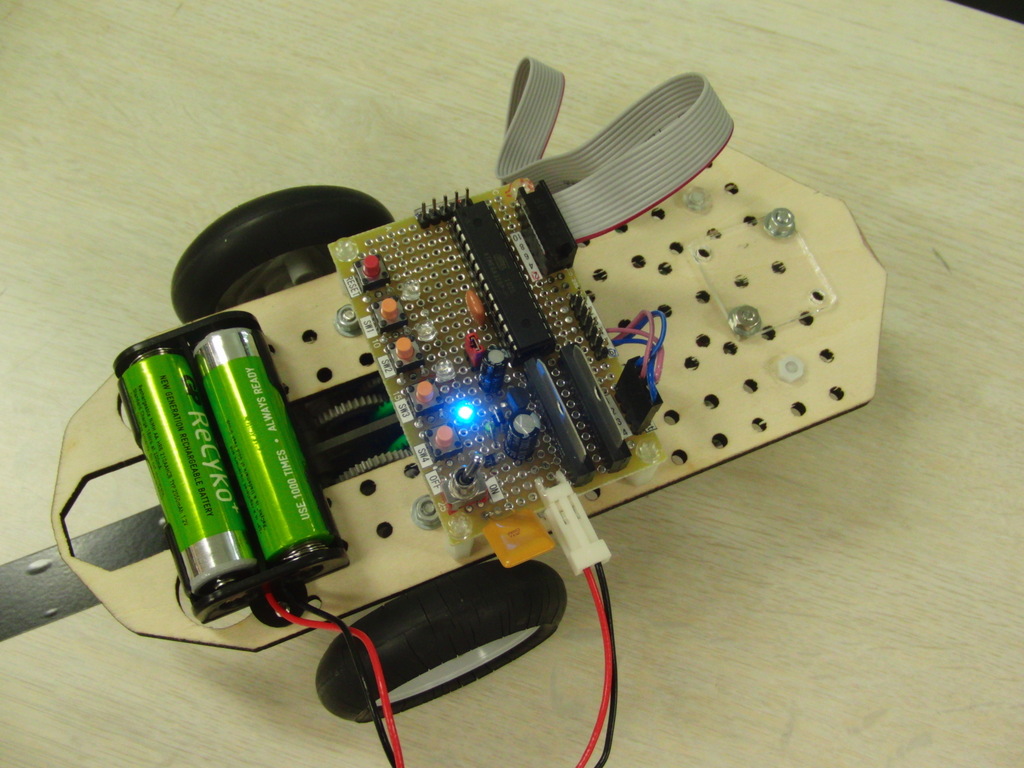
作りなおしたプログラムを動かしてみると、LEDが増えた分、派手になってなかなか可愛い。モータドライバーはVcc 5Vでも使えるTA7291Pを使用しているが、モータ電源2.4Vだと出力が足りない気味であることが判明。出力100%なら動くが、PWMで少し絞ってやると、すぐに止まりがちになる。速度調整できていない。電池は3~4本使ったほうが良かったかもしれない。
でもまぁ、これぐらい遅いほうが使いやすいとも言えるし、今回は10セット作るので電池は少しでも少ないほうがありがたい。
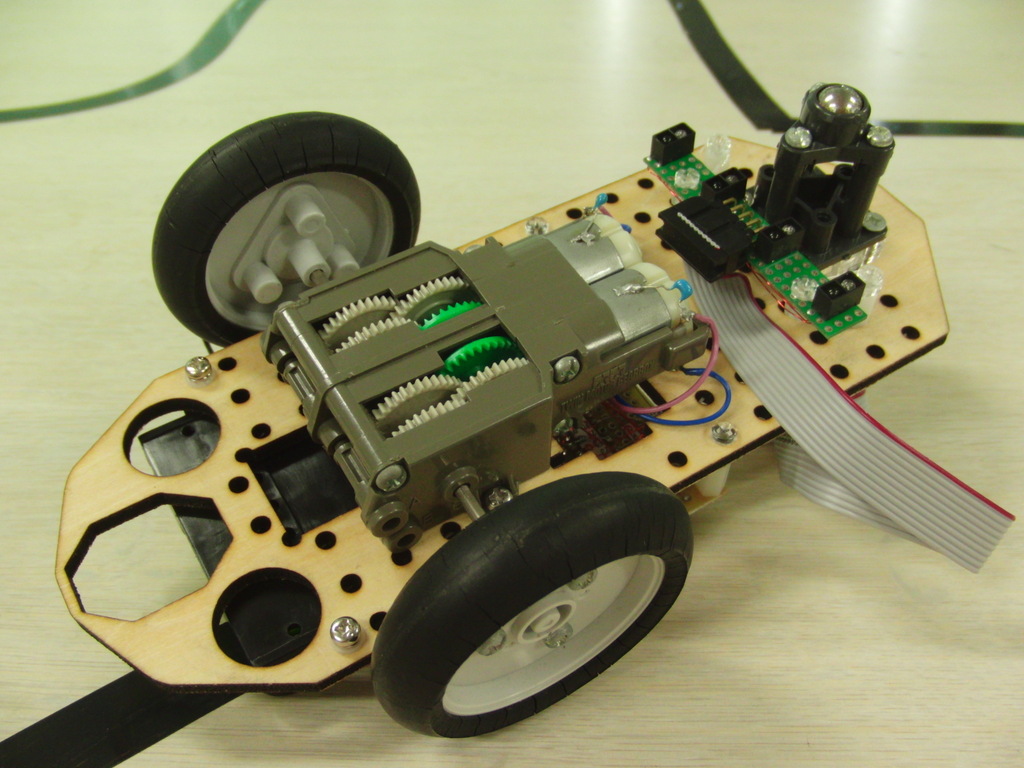
ちなみに、車体は4mmのシナベニアをレーザー加工機で切り出したもので設計・製作は3年生のK津君。あと今回調べてみて、センサー回りに、いろいろ問題がありそうなことが判明。これまでは、とりあえず動いているので、あまり調べていなかった。
ともあれ、これで、良い講習ができると良いなぁ。
-

- LEDが、かわいい
-
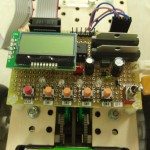
- ATMega328P+モータドライバ+昇圧回路
-

- 裏面、ギアボックスとセンサーとボールキャスター
-
- I2CのキャラクタLCDも 搭載可能

-
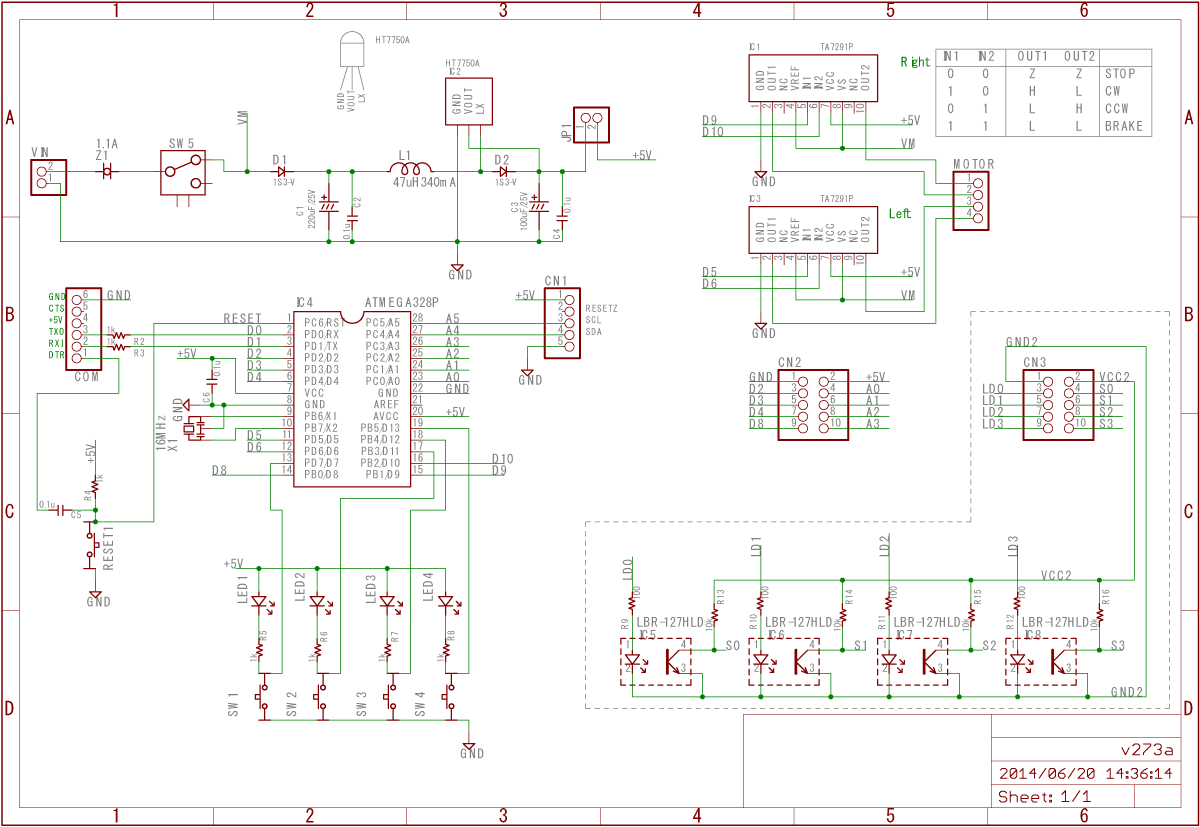
- 回路図
-
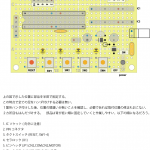
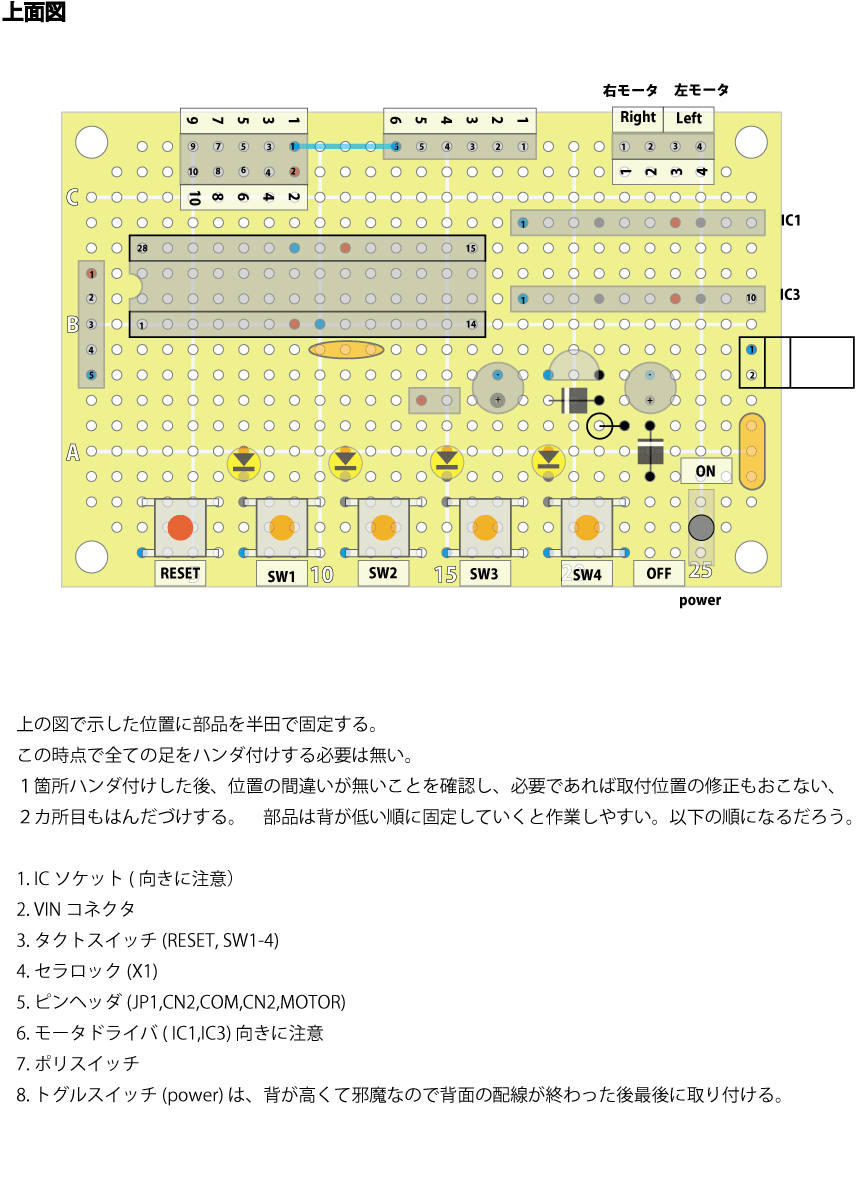
- 実体配線図(配置図?)
-
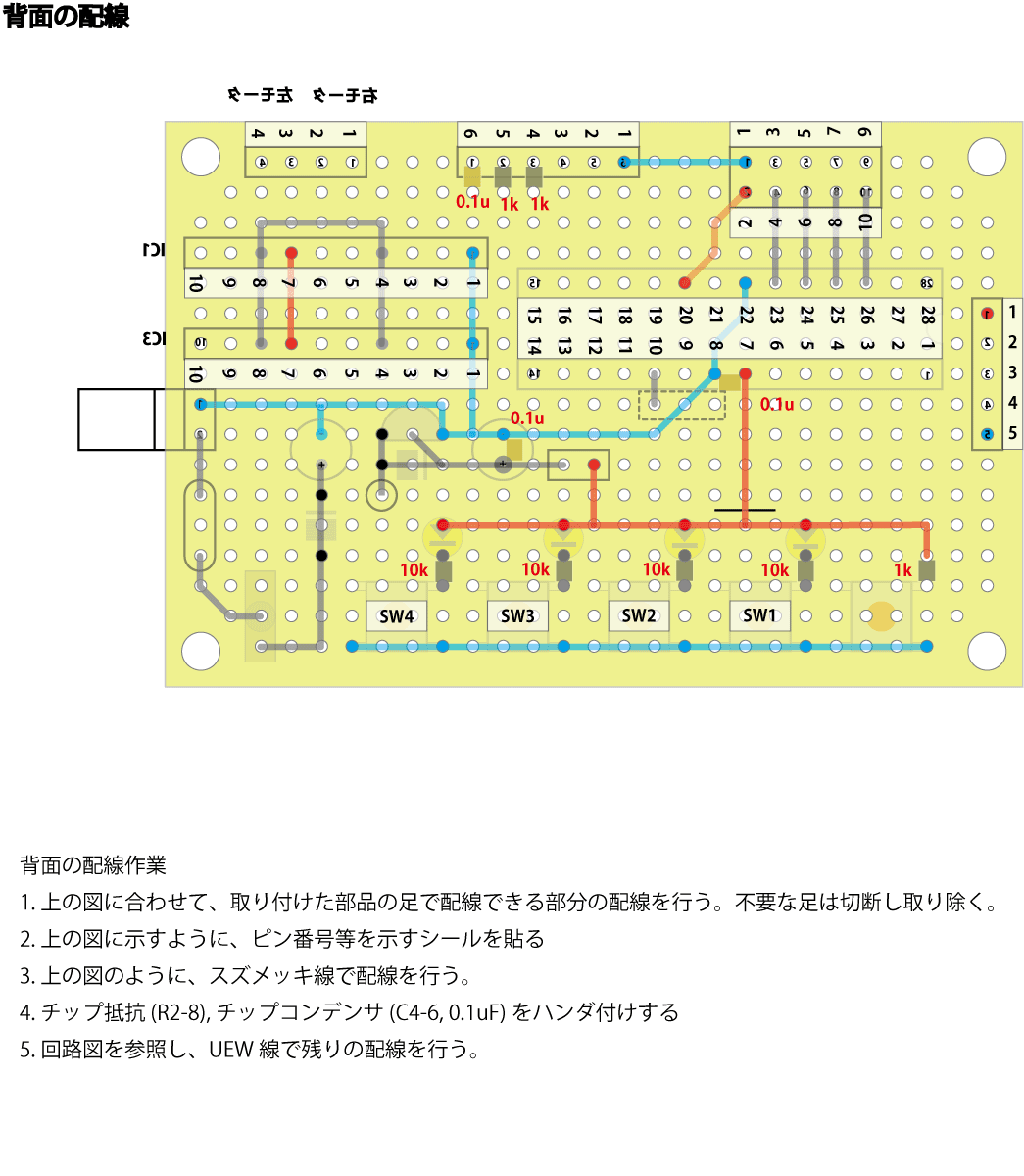
- 実態配線図(裏面)
-
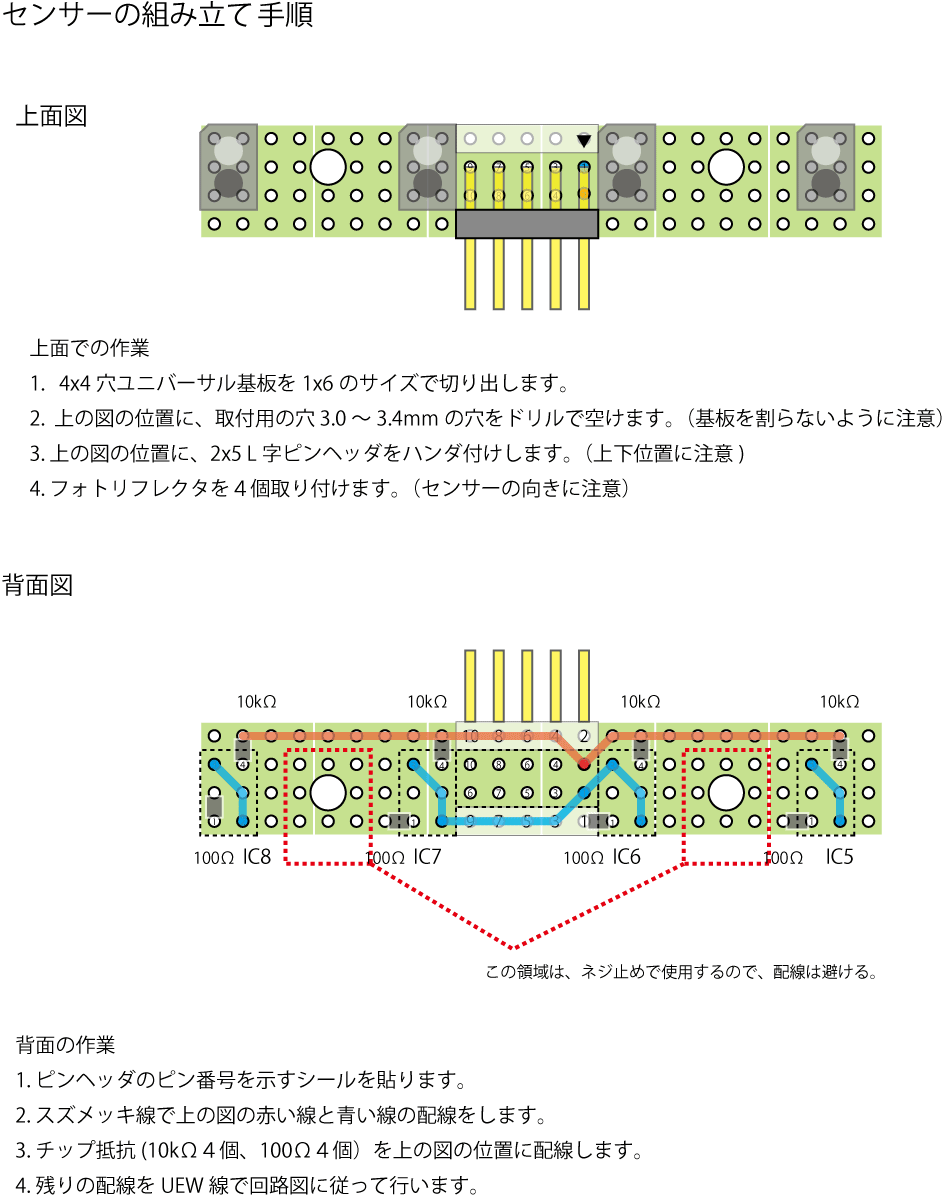
- センサー基板
最近のコメント