1 / 11
2011年7月6日水曜日
Category - メカ, 動画, 電子工作
Tag - 六足ロボット
 ライントレース・ロボットが完成したので後回しになっていた六足ロボットをいじる。
ライントレース・ロボットが完成したので後回しになっていた六足ロボットをいじる。
ポーズを編集しATMega328Pのeepromに書きこむプログラムを作成。
Arduinoはこの辺のライブラリが充実しているのでとても簡単にできる。
18個のサーボの位置をキー入力で編集していくのはなかなか面倒だがやらないと進まない。まず、座りポーズと立ちポーズと中間のポーズを作成し、それぞれ’a’,’d’,’s’キーに割り当てる。’a’,’s’,’d’と順に押すと徐々に立ち上がる仕組みだ。
続きを読む… »
2011年4月18日月曜日
Category - メカ, 金属加工, 電子工作
Tag - 六足ロボット
6足ロボットを保持する台を製作した。ロボットのアクリル板を載せる部分はDINレールを切断、下の台は50mm×6mmの鉄の平板で製作。φ10の快削の丸棒で100mm高のスペーサを作成、両端にM5のネジを切り組み立てた物。鉄の平板の下には、ネジの出っ張りをカバーするため、ゴム足が4個ついている。
鉄の平板の重さのおかげで、十分な安定感。ロボットが暴れても大丈夫そうだ。ロボットを載せた状態でもスペーサの丸棒を掴むと簡単に移動できるのが予想外だが便利。
足の先端にもゴム足を付ける予定だが、サーボの取り付けネジと干渉することが判明。そのうち直そう。
2011年4月11日月曜日
Category - メカ, 電子工作
Tag - 六足ロボット
サーボには可動範囲があるので、サーボの位置が決まらないと組立が出来ない。
Kumaduinoで作った18CH サーボ・インターフェースが完成し、簡単なソフトもできたので、足の組立を行う。
全部のサーボを少しだけ同時に動かすプログラムを作成し試してみると予想通り、CPUにリセットがかかってしまう。この時の電源電圧の変化を見てみると、50mSぐらいの間2Vほど電圧が下がっている。ちなみに電源はALINCOのDM-330MV,最大30Aのやつ。電源のメータが一瞬4Aぐらいまで振れている。
こんなこともあろうかと、kumaduinoではダイオードとコンデンサで外部電力の低下をキャンセルする回路が入っているのだが、100uFでは足りなかったようだ。470uFに変更するとリセットはかからなくなった。
保管状態でサーボに力が加わっていると壊れそうで不安なので、とりあえず真鍮の角柱で支えてやる。実験と保管用に保持する台を作成する予定。
2011年3月4日金曜日
Category - メカ
Tag - レーザー加工機,六足ロボット
鍋CADで簡単に描いた図面でアクリル板をレーザ加工機で切り出し、M2のネジで組み立てて六足ロボット試作版が組みあがった。剛性も思ったよりはある。しかし、サーボ18個を動かせるコントローラがまだ無い。
Bear-1を思い出す。 9年前か。FPGAで動かしてたのか。あまり進歩がない。さらっと作れるようになったのが進歩かもしれない。
写真のものは、足の付根のサーボホーンのつけ方を間違えている。翌日、修正した。
2011年2月21日月曜日
Category - メカ, 買い物
Tag - 六足ロボット
 20個 20個 |
 動くかな 動くかな |
何でもつくっちゃうかもの
記事で、
HobbyKingで安いサーボがあることを知り、20個程購入。$2.99/個を20個と送料$9.99で$69.79。 でも届くまでかなり待たされた。
サーボが動作することは、Arduinoで確認。6足ロボットを作ってみたいのだが、どうなるかな。
1 / 11
 ライントレース・ロボットが完成したので後回しになっていた六足ロボットをいじる。
ライントレース・ロボットが完成したので後回しになっていた六足ロボットをいじる。 自宅で加工した部品
自宅で加工した部品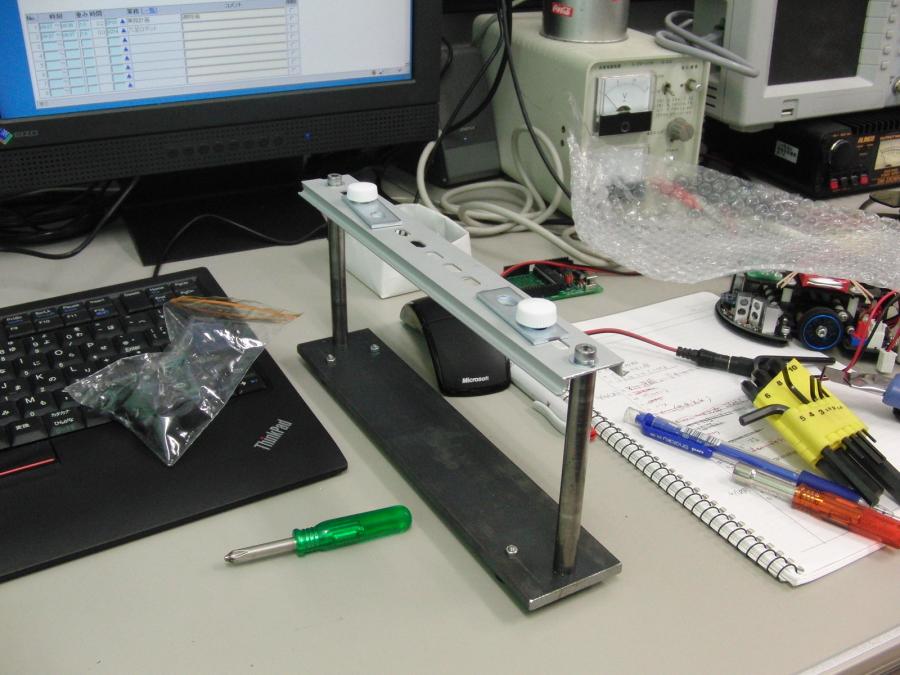 組立
組立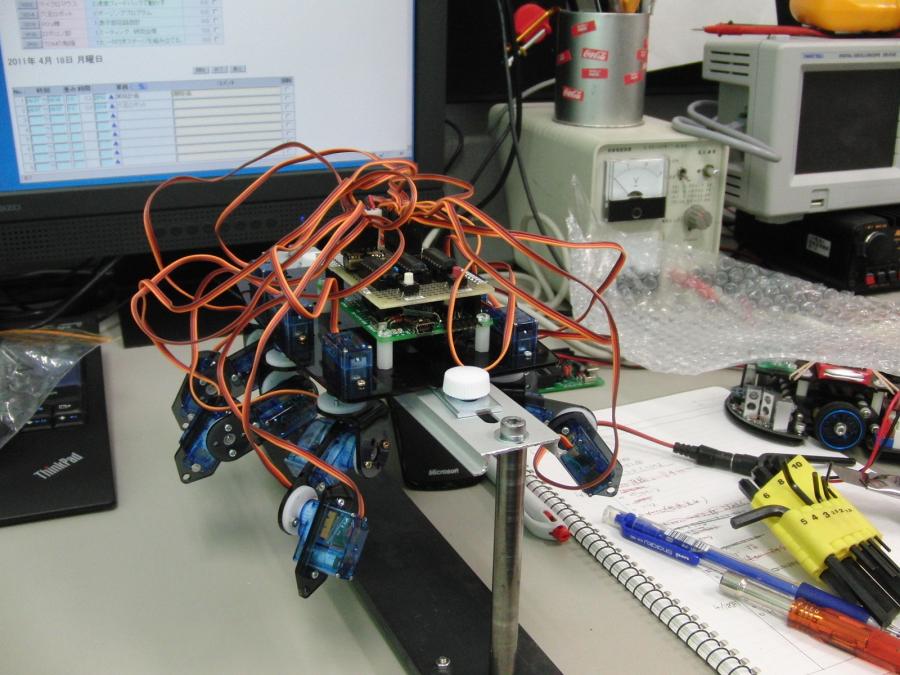 載せた
載せた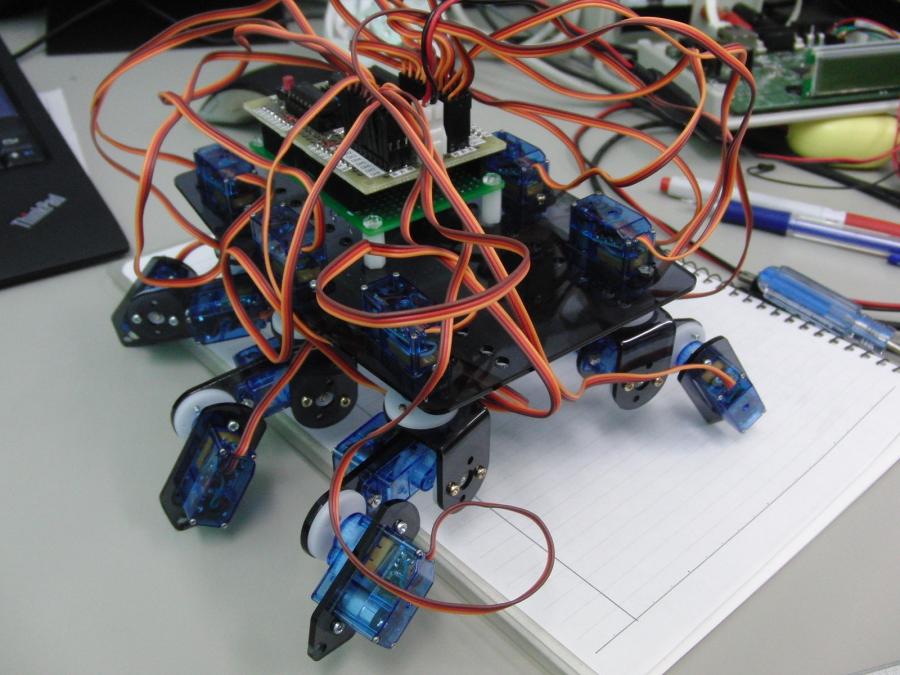 6足で立つ
6足で立つ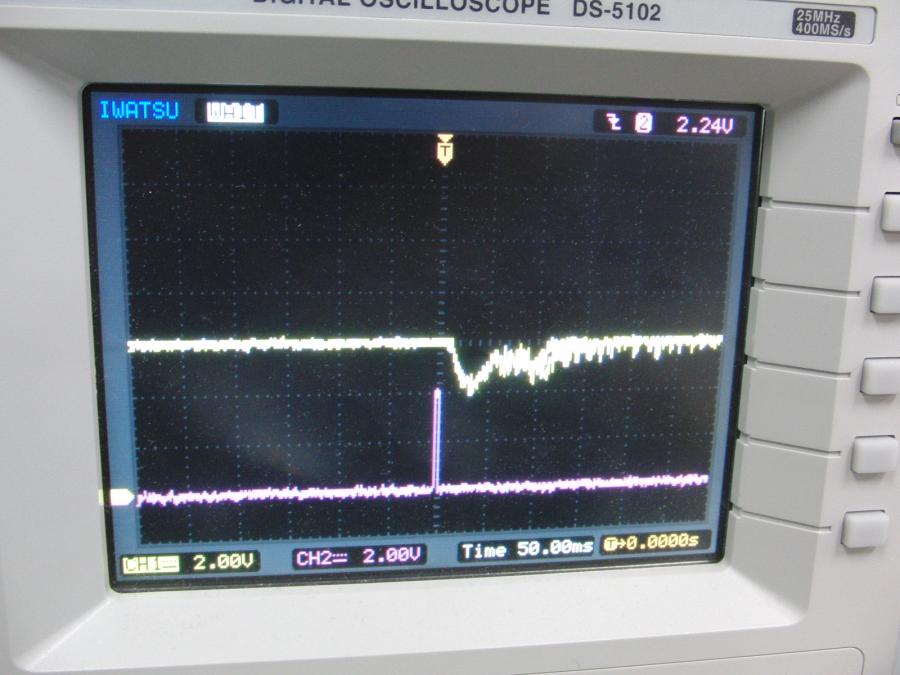 電源電圧の変化
電源電圧の変化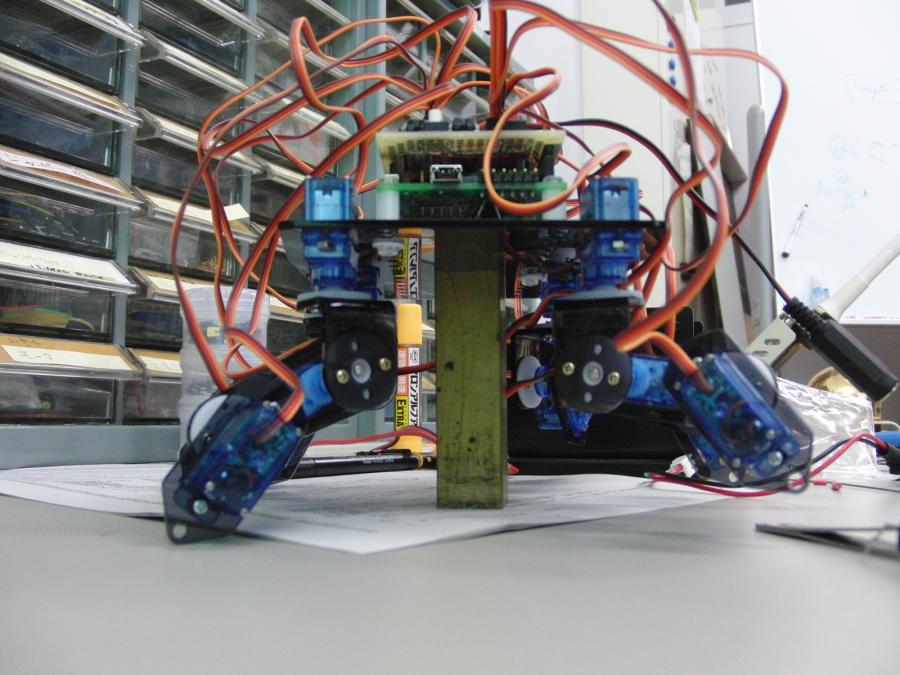 支えて保管
支えて保管 切り出し
切り出し 足1本
足1本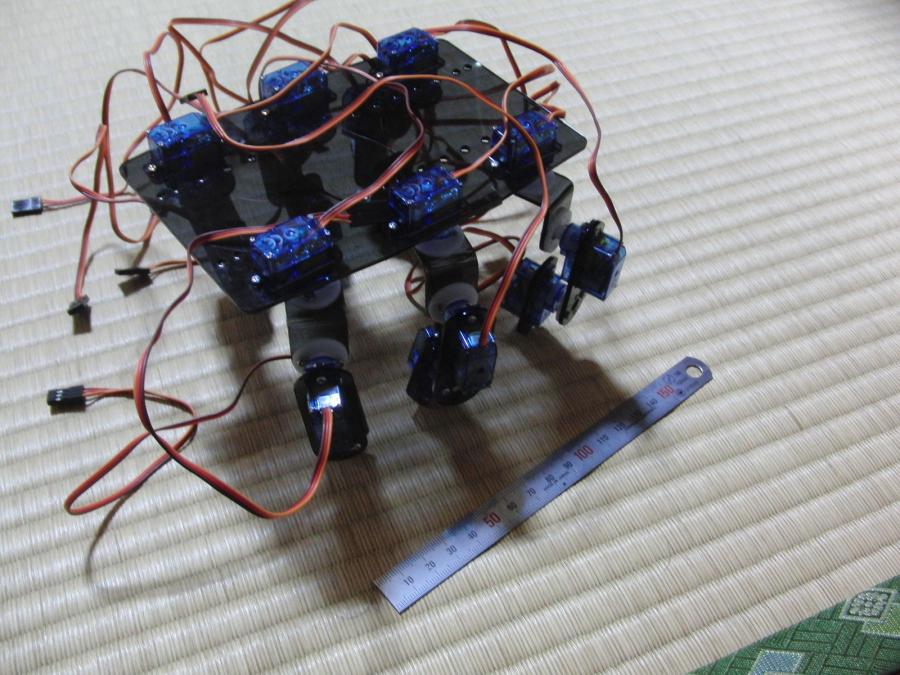 全体像
全体像 20個
20個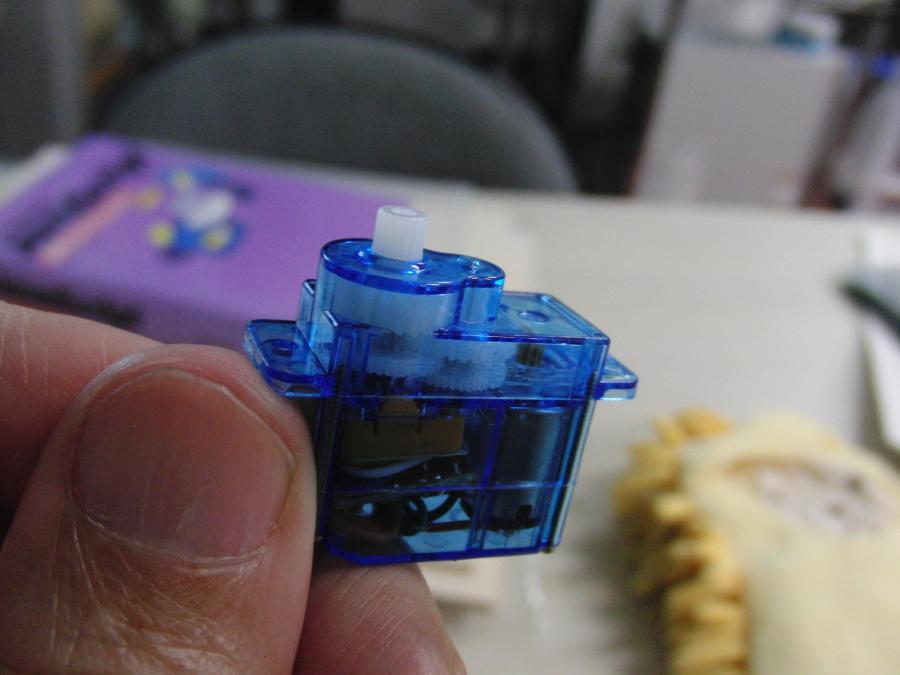 動くかな
動くかな
最近のコメント