
TopPage| 写真日記|
2002年 7月11日
偵察ロボット
動画 mpegファイル 5.8Mbyte 1分32秒
トランジスタ技術8月号 付属CDROMに収録されているものです。
| トランジスタ技術 2002年 8月号に偵察ロボットの製作記事を 書きました。 紙面の関係で、あまり写真を載せられませんでしたので、 ここにのせます。 関連ソフトのダウンロードは L-Card+のページや トランジスタ技術 ソフトウェア・ダウンロード・サービス を御覧下さい。 | |
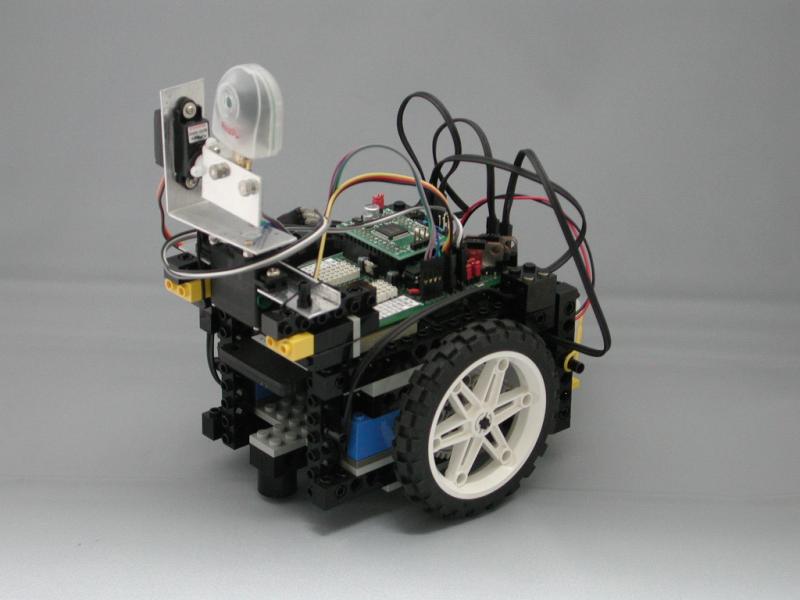 全体:
この偵察ロボットは、
記事のために作成したものです。
L-Card+ に 無線LANカードを刺し、
拡張ボードにH8/3664モジュールと LEGOとTrevaとRCサーボの
インターフェースを搭載しています。
全体:
この偵察ロボットは、
記事のために作成したものです。
L-Card+ に 無線LANカードを刺し、
拡張ボードにH8/3664モジュールと LEGOとTrevaとRCサーボの
インターフェースを搭載しています。
|
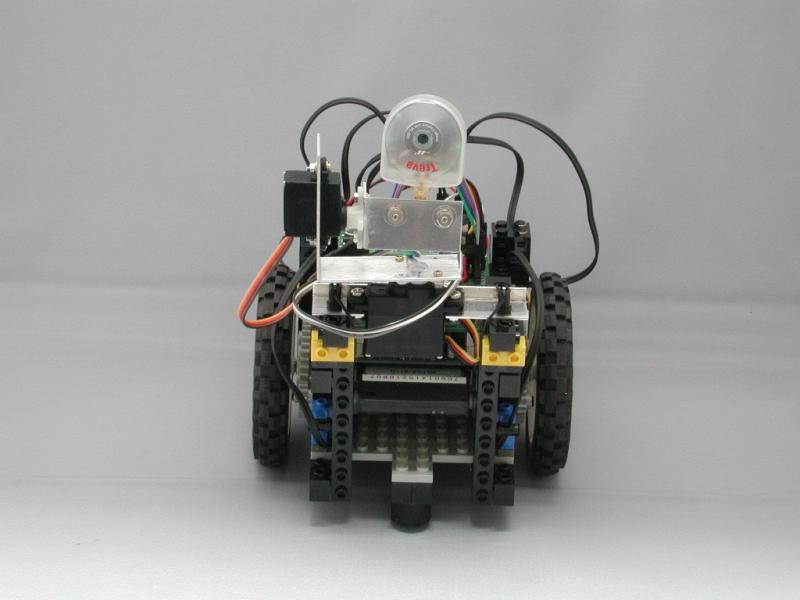 前:
前:
|
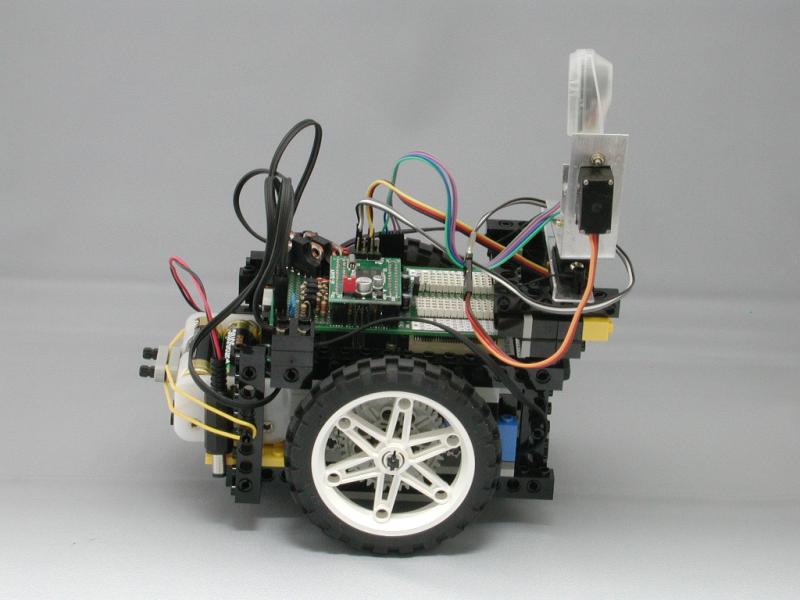 右:
右:
|
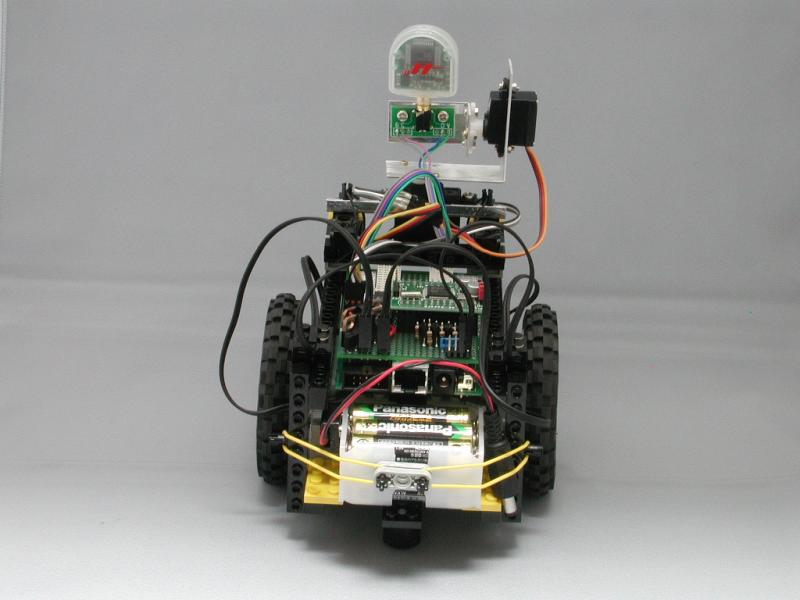 後:
単3アルカリ電池、6本で動作しますが、あまり
時間は持ちません。 20分〜30分ぐらいでしょうか。
実験中は、外部から電源を供給していました。
NiMH電池を使えば1時間以上持つと思います。
後:
単3アルカリ電池、6本で動作しますが、あまり
時間は持ちません。 20分〜30分ぐらいでしょうか。
実験中は、外部から電源を供給していました。
NiMH電池を使えば1時間以上持つと思います。
|
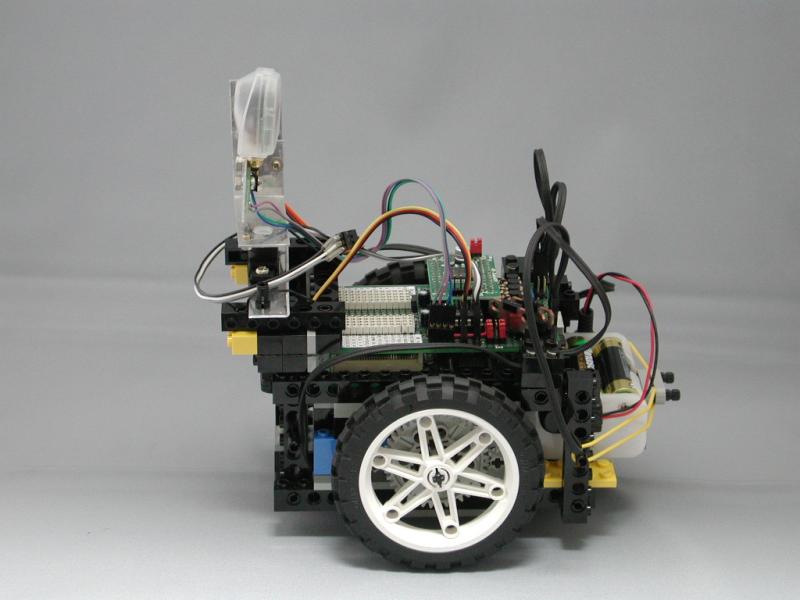 左:
なんとなく、にわとりを思わせるシルエット
左:
なんとなく、にわとりを思わせるシルエット
|
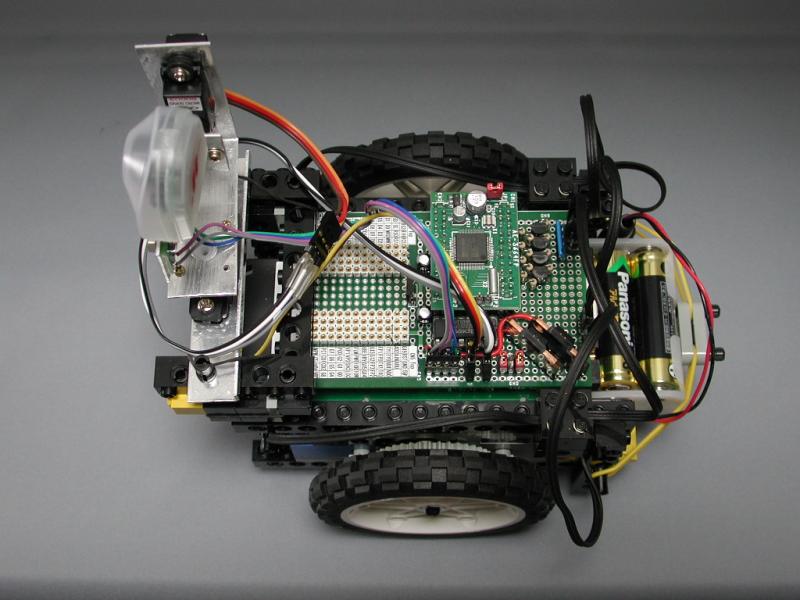 上:
L-Card+の拡張基板とH8/3664モジュールが見えます。
基板はのっけただけで、特に固定はしていません。
上:
L-Card+の拡張基板とH8/3664モジュールが見えます。
基板はのっけただけで、特に固定はしていません。
|
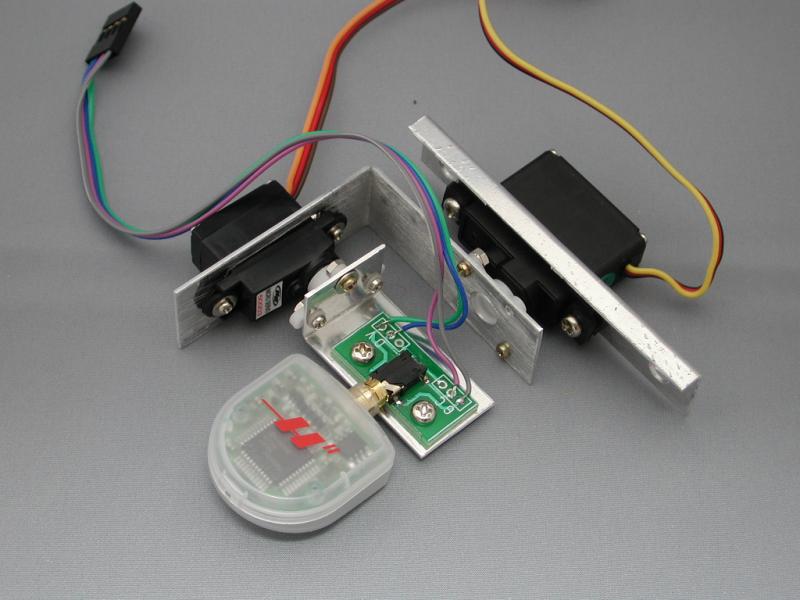 カメラ+サーボ:
Trevaの取り付けには
例の基板を使っています。
金具は1mm厚のアルミ板を曲げたものです。
カメラ+サーボ:
Trevaの取り付けには
例の基板を使っています。
金具は1mm厚のアルミ板を曲げたものです。
|
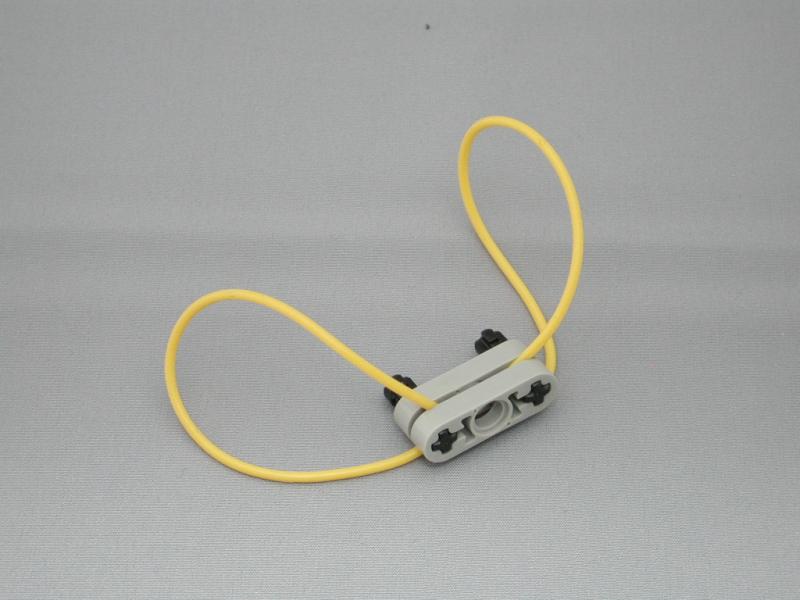 電池留め:
レゴの部品の輪ゴムを2つ結合したものです。
それっぽくて気に入っています。
電池留め:
レゴの部品の輪ゴムを2つ結合したものです。
それっぽくて気に入っています。
|
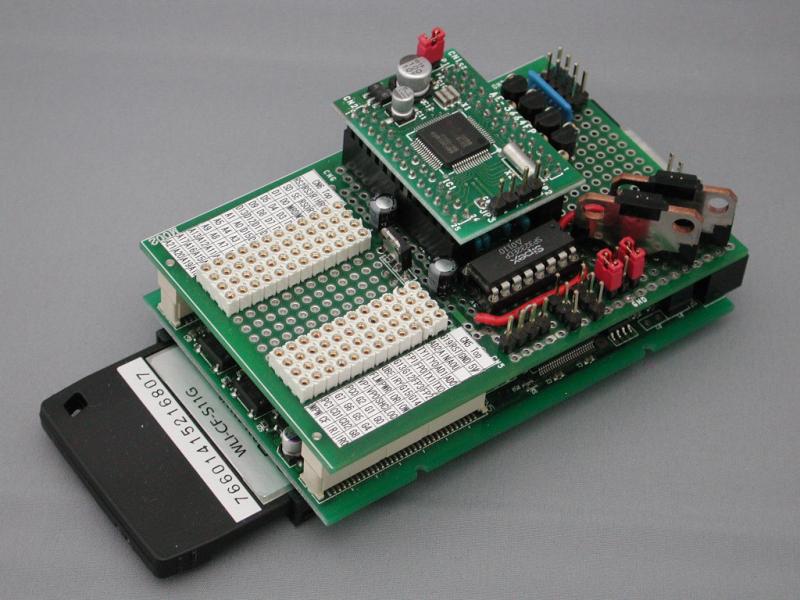 基板:
CF無線LANカード+L-Card+ 拡張基板 + H8/3664Fモジュール
基板:
CF無線LANカード+L-Card+ 拡張基板 + H8/3664Fモジュール
|
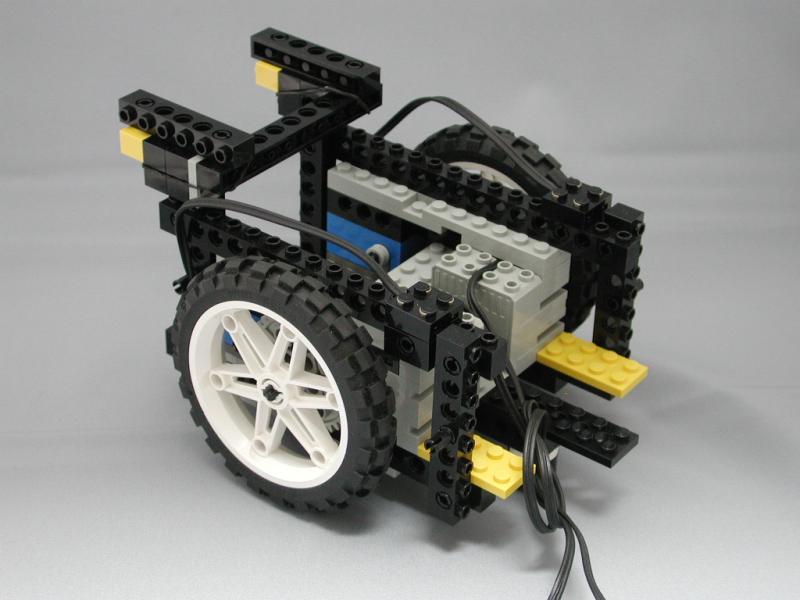 車体: レゴで作った車体です。
モータ2個、ロータリーセンサー2個使用しています。
車体: レゴで作った車体です。
モータ2個、ロータリーセンサー2個使用しています。
|
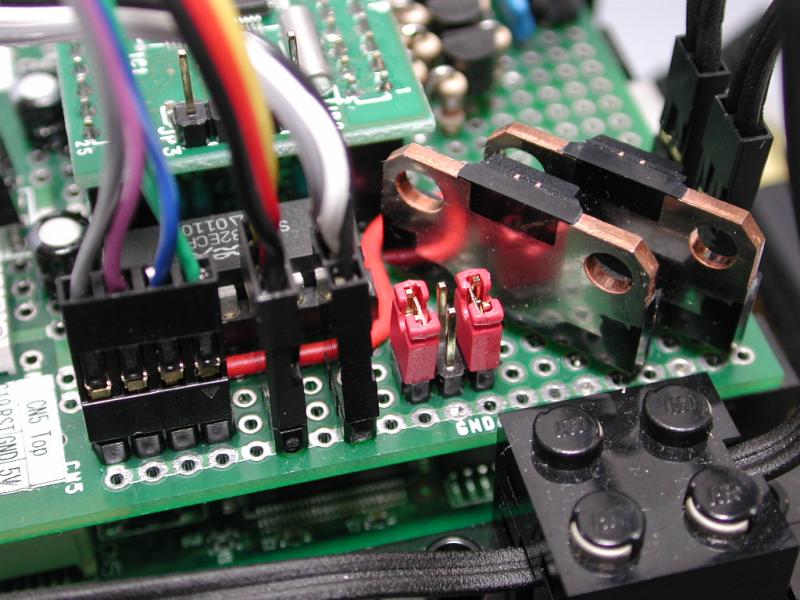 コネクター:
左から、Treva,RCサーボ2個、ショートピン2個刺さっているのが、
RS232Cです。
コネクター:
左から、Treva,RCサーボ2個、ショートピン2個刺さっているのが、
RS232Cです。
|
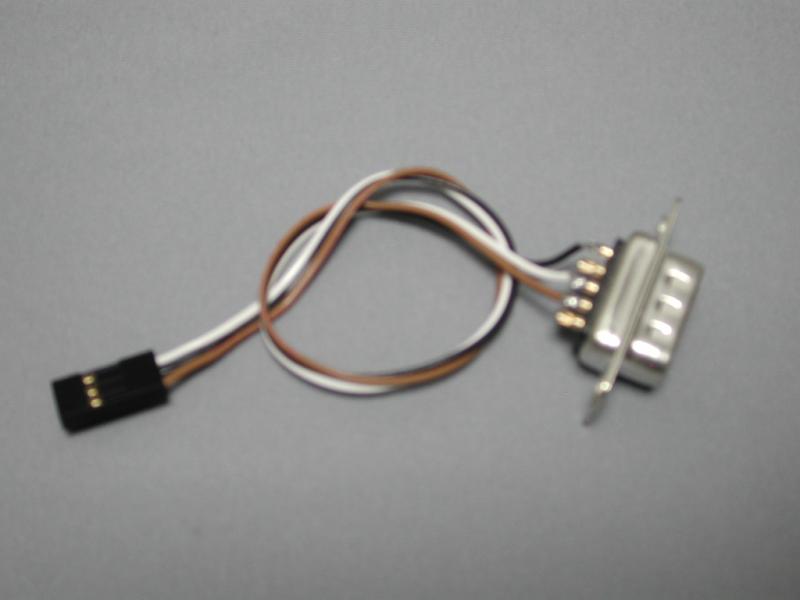 RS232C接続ケーブル:
ショートピンを外し、このケーブルでパソコンとつなぐと、
H8/3664Fモジュールのプログラム/デバッグを行うことができます。
RS232C接続ケーブル:
ショートピンを外し、このケーブルでパソコンとつなぐと、
H8/3664Fモジュールのプログラム/デバッグを行うことができます。
|
| まだまだ未完成、不満も多い車体ですが、 Trevaからの画像をみながらコントロールしているとなかなか 面白いです。 ソフトをちゃんと作り直して、本当に偵察できる ロボットにしたいと思っています。 | |