届いたものを調べると 思っていたのと違う。

届いたものを調べると 思っていたのと違う。
タイマーでヒータを動かし、容器内を加熱することは可能だが、 効果は不明。 湿度計が無いのが痛い。使う気にならない。
 |
 |
 |
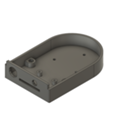
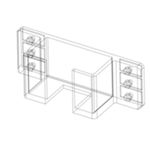
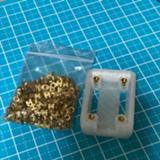
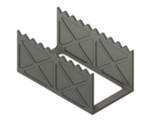
| ボコボコの箱が届く。緩衝材がちゃんとしているので内部は問題なし。 | 英文+独文の使用説明書。なぜ独文? | フィラメント フィーダとしても使えるようだ。 |
 |
 |
 |
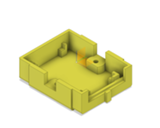
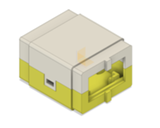
| フィラメントの重量センサ、ヒータなどがある。 | 乾燥剤スペースとFAN. | 重量(グラム、パウンド)、リールの重量設定、ヒーターの設定(4段階)、加熱時間の表示・設定が可能。 |
自作フィラメントBoxの方は未だに Bluetooth 湿度計待ち。 注文後1ヶ月になろうとしているが 8月20日に中国を出発した後、音信不通。 とりあえず今は 秋月の小型温湿度計で様子を見ている。 中華モバイルドライを入れているやつは 湿度18%と優秀なのだが、値が見づらい。
やはりWeb経由で記録が見たい。 となると Bluetooth温湿度計を待つか HSES-NODE-OLED に温湿度センサーをつないで WiFi 温湿度計自作するか.... 作ろうかなぁ。
で、このFilament Dryerは使う気になれないので ヤフオクに出品した。 興味が有る方は御覧ください。

BLTouchというセンサーを装着してやれば プレートとの距離を高精度に測定可能。 手調整は不要になるらしい。 各種3Dプリンタ用に BLTouch追加用のキットが 販売されている。
Ender3V2は発売されて間もないため、 正式なBLTouchキットは発売されていないようだが、 マザーボードにはBLTouch接続用コネクタがある。 比較的容易に繋げれるんじゃない? と考え、AliExpressに コンパチ品?を注文。3週間ほどで到着した。 価格は 1,245円。
 |
 |
 |
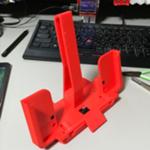
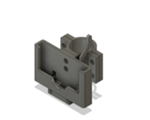
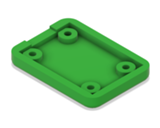
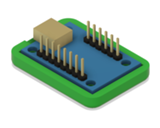
| BLTouch ? 3D Touch? | マウントとスペーサをプリント | 取り付け |
届いたので改めて情報を集めると Ender 3 V2 BLTouch Installationという 詳しい紹介動画があった。 結局 Ender 3 V2 BLTouch Firmware Installation Guide by Smith3D.com に従って作業をすれば良いらしい。 センサーを固定するためのマウントも、ファームウェアも、 slicerに追加するG-Codeの情報もここにある。
マウントをプリントしセンサーを取り付け配線。 ファームウェアのバイナリーファイルをダウンロード、 sdカードにコピー、Ender3V2に差し込み電源をいれると ファームウェアが書き込まれる。メニューが中国語に なっているので英語に戻す。 Z軸リミットスイッチは当たらないよう下にずらし、 Auto homeを実行するとX軸、Y軸はいつもどおり、 Z軸はBLTouchを使って原点調整が行われた。 この後、Z-Offsetを調整し、Z=0の時のプレートと ノズルの間隔が適切になるようにし、 さらにプレートの位置をいつものように調整してやる。 最後にCuraを起動し、Start G-codeの G28(Home all axes)の後にG29(start auto bed leveling) を追加し完了。
実際にプリントしてみて問題が発覚。 マウントを、そのまま使用するとセンサの位置が若干高いので 2mm程度のスペーサを挟みセンサーの位置を下げるよう 説明があったのだが、付けた感じスペーサなしでも行けそうに 見えたのでスペーサを入れずに試していた。 この状態だとセンサが反応する位置とノズルの高さの差が1mmもなく、 Z-offsetも0.6mm(プラス)だった。 この状態でプリントを行うとフィラメントが溶けた状態で Bed levelingが行われBLTouchが反応する位置までヘッドが 下がってしまい、 プレートに溶けたフィラメントが点々とついてしまう。 センサーを取り付け直し2mmのスペーサを挟み、 位置を再調整、Z-offsetも2.0mm(マイナス)となり 問題は解決した。
 |
 |
 |
| ファームウェア更新、メニュー増える | 点々と跡がつく | スペーサを追加 |
ファームウェアは良くできていて、 BLTouchが接続されていなくても 暴走などしない。 Auto homeを実行しても X,Yのみ動き、Z軸は動かない。 注意が必要なのはセンサーのマウントの取り付け。 取り付け位置が少しずれるとヘッドがX軸リミットスイッチを 押せない状態になってしまう。 結果として Auto Home時にX軸リミットスイッチに到達できず ガガガガーというステッピングモータの脱調音に驚いて 電源を落とすことになる。 原因がわかるまで焦った。
今回初めてEnder3V2のコントローラボードを見た。 結構、衝撃的なのが合っていないコネクタが多いこと。 今回のBLTouchもXH風コネクタにQIコネクタ(デュポンコネクタ?)を 刺すのだが、まぁ流用品みたいなので許せる。 FANのコネクタはピッチと ピン数は合っているが全く別種のコネクタだった。 どうしても外れてしまうのか、ホットボンドで固定されている コネクタもあった。こういうことが出来てしまう感覚が凄いと思う。 自分は気持ち悪くて無理だ。
今回知ったが、 Crealityのファームウェアの ダウンロードサイト には BLTouch対応と思われるファイル名にBLTouchが入っている ファームウェアが 8月29日にアップロードされている。 正規のBLTouchアップグレードキットの発売も近そうだ。 ちなみに、このファームウェアを使わなかった理由は Z-Offset調整機能が無いとか動画で言っていたから。 正規品ならZ-Offsetとか要らなさそうな気はする。

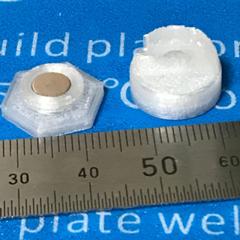
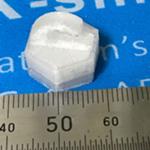
届いた時、サランラップのようなもので 包まれていたがシリカゲルの色はピンク、 しっかり湿気を吸い込んでいるようである。 AC100Vを接続し、加熱してやると 3時間ぐらいでシリカゲルはキレイな 青色になった。 自作フィラメントBOXに入れると きれいに収まる。
フィラメントBOXは、湿度計が無いので まだ使っていない。まぁ、使っても 良いのだが、このところ プリント意欲が落ち気味。 Vtuberばかり見ている。
 |
 |
 |
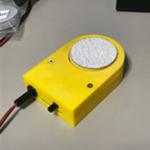
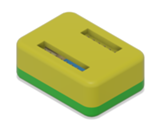
| 到着した時点では、シリカゲルはピンク。 しっかり湿気を吸っている。 | 3時間ほど通電したあと。シリカゲルは青に。 状態がわかるのはありがたい。 | 自作フィラメントボックスにキレイに収まる。 人の設計ながら偉い。 |

感想は「世界が広がった」である。 前の3Dプリンタ、 X-Smartを買ったときも 好きな形状をCADで設計し作成できる ようになって世界は広がったのだが、 今回は別の方向に広がったと感じた。
youtubeでender3と検索すると 改造/upgradeの記事が大量にある。 コントローラの基板も別のものに交換可能だし、 ファームウェアも marlinでオープンソース、 ender3v2の設定も公開されているので いじり放題、ということで 世界が広がったと感じるのだと思う。
あと、これまで3Dプリントするネタが足りな気味で、 わざわざ作っていたような状況だったのが、 急に作らなければいけないものが色々と 発生したことからも、いろいろプリントできる! と開放感を感じる原因なのかもしれない。
以下、細かい感想に移る。
X-Smartに比べて格段に良い。 余分な付着物が格段に少なく 印刷後の修正がほとんど必要ない。 Ender3v2だと印刷しない移動だけの区間の前に フィラメントを引く動作が入る。 このことにより、移動だけの区間のヒゲの量が 格段に少なくなっているものと思う。 これはプリンタではなくslicerソフトの設定の問題なので X-Smartも改良できる可能性がある。
同じものを印刷するとX-Smartの方が30%程度速い感じ。 基本的に、印刷範囲が狭い小さな機械のほうが 動く部分の重量が小さいので早く動かしやすい。 プリント速度は X-Smart 60mm/sに対し Ender3v2は50mm/s。 あと slicerの設定がEnder3v2の方が丁寧というのも ありそう。
現状だいたい同じくらい。 Ender3v2の印刷失敗は ステージへの印刷物の定着不良で起こっている。 ノズルの高さ調整の失敗だろう。 正常に印刷できたあと、そのまま次の印刷を 行ったら失敗したことがあった。 Z軸リミットスイッチの繰り返し精度に問題があるのかもしれない。 今は、印刷のたびにノズルの高さ調整を行っている。
この点、X-Smartは一度高さ調整を行うと 何ヶ月もそのままで失敗することが無い。 Z軸のセンサーが違うのだろうか。 X-Smartはフィラメントの吐き出し不良で失敗することが しばしば有る。フィラメントが湿気を吸い込んでしまった せいではないかと疑っている。 Ender3v2で吐き出し不良は起こっていない。 封から出して間もないので湿気をそれほど吸っていない ということかもしれない。
仕様で X-Smart 140x140x140, Ender3v2 220x220x250 なので 当然、Ender3v2の方が大きい。 ステージのギリギリまで印刷させると 反ることが多いので、X-smartは実質 100x100x140だと 思って使用している。 Ender3v2でギリギリまで印刷できるかは試してないが、 周辺20mmをあきらめても180x180の範囲は印刷できる。
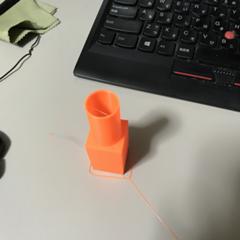
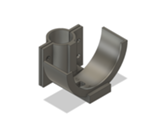
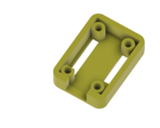
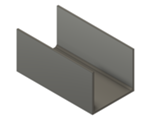
今回、 PCB Holder/Gripperや Filament Holderを印刷したが、 これらはX-Smartでは印刷できないか、設計変更が必要になる。
 |
 |
 |
| PCB Holder/Gripper | Filament Holder | フィラメントを乗せたところ |
Ender3v2はステッピング・モータがドライバの変更で 凄く静音化されていて動作音がほとんど聞こえない。 しかしファンの音がうるさい。 ファンの音なので変化のないホワイトノイズのような感じでは あるがうるさいのはうるさい。使うのをためらう場面もある。 将来、ファンの交換等で静音化したい。
X-Smartはもっとうるさかったと思うのだが、 今は離れた場所に置いて使っているので 騒音問題は無い。使いやすい。
OctoPrintは 3Dプリンタのサーバのようなプログラム。 Linux/Mac/Windowsで動作するが Raspberry Piで使っている人が多いようだ。 自分もRaspberry Piにインストールしたが SDカードのイメージファイルが提供されているので すぐに動作させることができた。
OctPrintの機能は主に2つ。 1つはプリンタサーバのように動作し、 ネット経由で3Dプリントできる。 Slicerソフトである Ultimaker Curaにプラグインを導入すると 直接3Dプリントできる。
もう1つは 3Dプリンタの動作に同期して TimeLapse動画の撮影ができること。 ネットでよく見る3Dプリンタのヘッドが写っていない TimeLapse動画の撮影方法を調べていて OctPrintを知った。
ちなみに私は撮影用のUSBカメラ固定の 部品待ちで、まだ撮影できていない。
これら以外にも興味深い機能として Terminal機能で 3DプリンタのMarlinとの 通信内容を見ることができたり、 gcode analizerでプリントの様子を表示させたり、 プリント中のlayer番号を知ることができる。
これら以外にもプラグインで追加できる機能が いろいろ有るらしいのだが私は未だ試せていない。
実際に使う段になると、 3Dプリンタに加えてサーバー(raspberry-pi)の電源をon/off するのが面倒くさい。常時稼働させたいところだが、 sd-cardのread-only化には対応していないようなので 常時稼働させると数ヶ月でsd-cardが死ぬような気がする。 あと、動作させていると ender3v2のコンソールの表示が 変になる。 sdカードが1枚駄目になってしまったが、 octprint使用中に指していたせいかもしれない。 この辺の問題は、usbカメラを固定できて time lapse動画を頻繁に撮るようになったら考えようと思う。
Ender3v2で世界が広がったため 忙しくなったような気がしている。 急いでも仕方ないし、 よく考えると急ぐ必要はないので、 じっくりと1つづつ作るなり解決するなりして行きたい。
とりあえず、防湿フィーダやtouch sensorなどの 優先度が高いのだが、防湿フィーダは 湿度計の到着待ち(1ヶ月?)だし、 touch sensorは Ender3用程は部品がいらないはずなので Ender3v2用touchセンサーを待っている状態。
とか思っていたら Ender 3 V2 - BLTouch Optical Prove Sensor なる動画が投稿されていた。 概要に 販売サイトらしきページへのリンク があるのだが、何語かもわからない。 World Wideな世界だ。
marlinのコードも読みたい。

記事に出てくる中華モバイルドライが アマゾンだと2,959円。 中国製なのでAliExpressで買えば安かろうと、 mobiledry とか検索しても見つからない。 いろいろ試しても見つからないので、ほぼ諦めたあと、 filament dryer で検索したら トップに出てきた。 USプラグが選択できて 1,519円+送料139円。ほぼ半額。 もっと安い 1,423円+送料22円の奴もあるが、これは プラグの指定ができないので EU Plugで日本のAC100Vのコンセントには刺さらない 可能性がある。 届くまで1ヶ月近くかかると思うが どうせ、そんなに早く出来上がらないので問題ない。

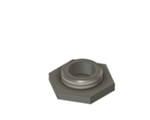
ちなみに正規品?だといくらぐらいだろうと ミスミで調べるとブラケットだけで 63円/個ぐらい... あまり高くなかった。 アルミフレーム関連は重量もあるし 中国から買ってもメリットは無いようだ。

X-SmartがあるのにEnder-3 V2を購入した理由は
自分で設計するものは小さく分割するのでいいのだが、 既存データ例えば PCB Viceとか PCB Holder/Gripper とか プリントしようとすると X-Smartでは無理がある。
湿度が高い環境にPLAフィラメント等をおいておくと、 フィラメントが水分を吸ってしまい フィラメントの吐出不良や詰まりが発生してしまう らしいが、私のところでも正にその問題が発生する。 やりなおせばプリントすることができているのだが、 失敗率も高いし、詰まってしまうとヘッドの分解が 必要で、かなり面倒なので対策したい。
 |
 |
 |
| ダンボール到着。OCS->佐川で来た。 | 部品はこんなもん。 | 組み立て完了 |
附属の英語/中文併記の説明書を見ながら組み立てる。 ものは良くできていて組み立ては楽だが、 ネジを締めるのに苦労する箇所や 部品の向きが分かり難いなども問題はある。 附属のmicroSDカードの中に11分ほどの 組み立て説明動画のmp4ファイルがある。 これを事前に見ておけば分かりやすいだろう。 (今、気がついた。)
組み立て後、レベル調整を行うが上手く行かない。 Z軸のリミッタの位置を調整しても、ステージとノズル先端の 感覚がネジの調整範囲に収まらない。 あと、ステージにもガタツキがある。
ここで CHEPの 動画 Assemble the Creality Ender 3 V2を見直す。 わかったのは以下の3点。
偏芯軸を回し調整後、X軸のフレームと上辺のフレームの 高さを確認すると、両端で2mmもの差がある。 その後、偏心軸を再調整、X軸フレームの取り付けネジの再調整を 行うことで、ほぼ差が無い状態になり、レベル調整も終了。 microSDカードに入っていた dog-2h.gcode というデータを プリントすることができた。
これらのことは、附属の説明書には記述が無いので、 Ender-3 V2の組み立ては初心者には難しい、 経験者向けの機械だと思う。
動かして驚いたのは、ステッピングモータの音がしない。 ファンの音しかしない。ステッピングモータの音は 時々聞こえることがある程度。 静かになったのは、ステッピングモータのドライバーが 変わったからだと聞いた。3Dプリンタの動作音に 悩んでいる人は制御基板の更新等を検討する価値はある。 ファンの音は結構うるさい。
 |
 |
 |
| 附属microSDカード中のデータ dog-2h.gcodeをプリント。 | dog-2h.gcode 出来上がり | テストデータをcuraでスライスしプリント。 左は以前X-Smartでプリントしたもの。 右が今回Ender-3 V2でプリントしたもの。 特に気になる差は無い。 |
プリントしていて、フィラメントのステージへの定着の 問題、外れてしまうとか反ってしまうとかの問題が 割と発生する。今の所、レベル調整のやり直しとか ラフトの追加とかでなんとかなっているが、 3Mのプラットフォームシートとか 磁気式シートの使用を検討している。 この点はX-Smartの方が使いやすい。 最初から磁気シートだし、ステージへの定着は良好。
今後は、 いろいろ改造し使いやすくしていきたい。 OctoPrintとか面白そう。

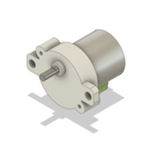
先日、実験に使ったHDDのモータはフレームと一体型で 小型のサンダーを作るのには使えないので、 廃棄HDDをもう1台分解。分離型のHDDモータを入手できた。 マジックテープと接着剤はダイソーで購入。
 |
 |
 |
| 50mm径のサンダーセット | ダイソーで購入: 縫い付け式マジックテープ | ダイソーで購入: 2液式エポキシ接着剤 |
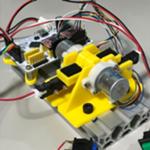
ケースの形状は 元ネタ を参考に、モータや基板、DCジャックが収まるように Fusion360で設計。 ケース各部の結合をどうするか悩んだが、 今回は埋め込みナットは使わず スペーサを使用することにした。 埋め込みナットだとケース内部に 柱を建てる必要がある。 スペーサだと、その柱の代わりになる。 ケースの外側からみえるネジが増えるのが 何だが、それを気にしなければ良い方法だと思う。 特に今回は試作1発めだったのでスペーサで楽ができるのは有り難い。
 |
 |
 |
 |
| ケース底部 | モータ、基板、中板 | 全体 | 基板を写真からモデル化 |
Fusion360で設計時、使用する部品のモデルがあると 考えやすいので最近は積極的にモデルを作るようにしている。 今回はHDDモータ、モータドライバ基板のモデルを作成。 DCジャックは円筒形で代用した。基板のモデルの作成で、 写真を取り込みを行ってみた。 寸法を合わせて、穴や主な形状(VR、コネクタ)を作成したが 作業が楽。写真が入手できる場合はアリな気がする。
 |
 |
 |
| スペーサを多用 | 組立中 | 完成状態 |
各部品、わたしの3Dプリンタには割と大きい(10cmぐらい)し、 反ってもらいたくなかったので1つづつ印刷した。 私のプリンタ(qidi X-Smart)の印刷可能領域は 140x140x140mmだが 端の20mmぐらいはヒートベッドの効果が低く反る可能性が高い ことがわかってきた。つまり反らないのは100x100mmぐらいまで。 なかなか狭い。 Ender3-V2 (印刷範囲 220x220x250)を買う理由が増えてきた。
組立は順調に進み、完了。動かすとそれなりに動いた。 アルミやPLAを削ってみる。 めちゃくちゃ削れるわけではないが、 それなりに削れる。 ものを押し付けると回転は落ちる。 最大出力だと力強いが、高速回転はちょっと怖い。
やはりマイコンで定速制御をかけてやると 楽しいのではないかという気がする。 実用品か?と考えるとちょっと疑問。 廃棄物で割と簡単に作れる 実用にもなるかもしれないもの...と言ったところか。
実際に使おうとして作っているわけではない。 動作が面白いから作って見るだけ。 メカものの製作の練習。
3Dプリンタで静物(非メカもの)で実用品を作るのは簡単。 というか普通、実用品しか作らない。 実用品以外はテストプリントぐらい。 でも、それだけだと3Dプリンタの用途が限られるので メカものにも手を出したい。 しかしメカものの実用品はハードルが高い。 本当に実用になるものを作り上げるには 膨大な時間を投入する必要がある。 実用にならなければ作る意味は無いとか 言っていると、いつまでも作れそうにないので、 練習から始めることにした。
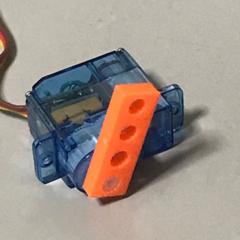
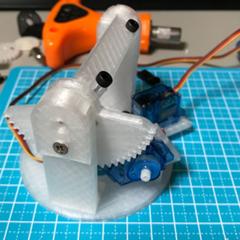
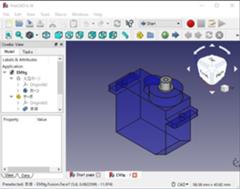
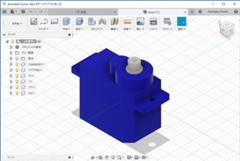
最初、マイクロサーボSG-90(の模造品?)で作ったのだが、 $2/個で買った模造品のせいか動作がスムーズではない。 回転角度も180度欲しいのだが、少し足りない。 静止状態でも若干動いてしまうのでサーボは諦め 以前秋月で販売していたCOPALのギア付きステッピングモータ SPG20-1331を使用することにした。 原点検出には パナソニックのAV620264を使用。 コネクタ付きケーブルも買えるのが良い感じ。
設計はステッピングモータとマイクロスイッチのモデル作成から始める。 ステッピングモータは データシートを見て図面を入力。 マイクロスイッチはメーカーのサイトから 図面のDXFファイルをダウンロードできたので、 これをFusion360のスケッチに読み込み、 適当な領域を選び押し出すとモデルができた。 各部の外観を適当に設定してやるとそれっぽい。 あとは、これらを適当に配置。間を埋めるように 部品を作成し設計は完了した。 今回作成したのは試作品。 全体の大まかな動きが確認することが目的なので、 実験のしやすさを重視している。
 |
 |
 |
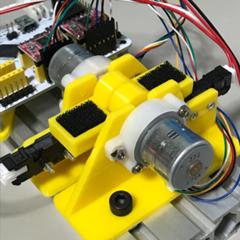
| ステッピングモータのモデル | マイクロスイッチのモデル | 全体図 ... というか半分。 これ2個で完成。 |
3Dプリンタでの印刷では、いろいろとトラブルに見舞われた。 主な現象はフィラメントの詰まり。数回ヘッドを分解することになり、 ヘッドの構造には詳しくなった。原因は、使っているフィラメントが ABSだと思ってたのだが実はPLAで設定温度が高すぎたこと。 ノズルより上のフィラメントを送り出すステッピングモータのあたりまで フィラメントが柔らかくなり詰まってしまいフィラメントを送り出せなく なっていた模様。
ABSのフィラメントが無いから買い足したものを使ったので、 当然ABSだと思っていたら、実は間違ってPLAを注文していた。 Amazonで購入したのだが、ABSフィラメントで検索して 注文したつもりなのに、表示される関連商品にまどわされて PLAを注文していたようだ。
 |
 |
 |
| 前から | 後ろから | 自作 PIC32MX220 + A4988ステッピングモータ・ドライバーモジュール基板 |
プリント完了後、部品を組立てアルミフレームに固定する。 なんでも固定できるアルミフレームは試作に便利だ。 全体を固定できると実験もやりやすい。 制御に使っているボードはPIC32MX220を使用した自作ボード。 A4988ステッピングモータ・ドライバー・モジュールが乗っている。
次は全体を1パッケージに、まとめて完成させる予定。 今はチップを乗せる部分を導電性スポンジを使用しているが、 これだと 1.6x0.8mmのチップ部品などでは埋もれてしまったり 飛んで行ってしまったりする。この部分はゴムシート に変更する。 本当に実作業に使用するのであれば、ゴムシートと フィラメントは導電性のものにすると良いのかもしれない。
投稿者のValera Perinski氏はチェコ在住、 チャンネル登録者は2,290人と未だ少ない。 動画リストには、 自ら使用するような工具の作成動画が多い。 見覚えがあるものもある。 これも氏のものだったか。
動画の特徴を挙げる。
以下、自分でも作ってみたいもの。
スイッチサイエンスの コンタクトプローブ・クリップ を買ったのだが、使っていない。 動画のヤツのほうが完成度が高い気がする。
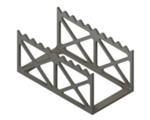
ハンダゴテでナットを埋め込むのにスタンドが必要、とは 思っていないが、このスタンドの構造/機構がよくできている ことに感心する。作ってみたい。
これも機構が良くできていることに感心する。 自分に実際に必要かどうかは疑問。
他の動画にも必ず出てくるハンドドリル・ハンドル。 簡単そうな見た目だが作るのは大変そう。
金属加工機械(旋盤、フライス、バンドソー)は手放してしまったので、 アルミアングルや基板等を気軽に切れる機械が欲しい。 HOZANだと K-111 PCBカッター 29,590円とか K-210 卓上丸鋸盤 71,720円で結構高い。 自分で作るのも楽しいか。 しかし、ネットで「卓上丸鋸盤」を検索すると 安いものがある。 NovelLifeのミニ・テーブルソーは魅力的だ。 とか言ってると作る必要無くなってくるんだよなぁ。
きっかけとなった Stencil Printerは、 あそこまで凝らなくても、 例えば これで 充分ではないかという気がしている。
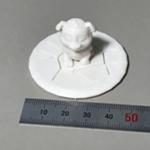
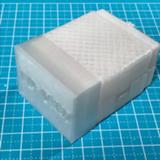
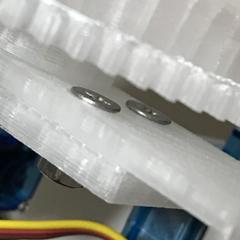
嵌合の具合とかは 0.1mm刻みで試せば わかるだろうと試した結果、 使えるものが印刷できた。 穴の形状を以下に示す。
苦労したのは、設計で極小、0.1mm単位の 山を作っても ノズル径0.4mmでは再現されない ことと、PLAの印刷不調。
最初は、滑り止めの山はもっと低かった。 これではプリントでは山が再現されず、 つるつるの丸穴にしか見えない。 Slicerで確認し、山を高くした結果、 使えるものになった。
 |
 |
 |
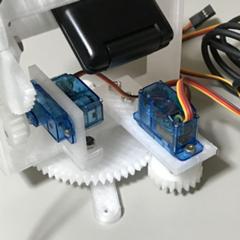
| サーボ付属のホーンと、それにネジ止めした3Dプリンタ出力のギア。従来の技術。 | スライサーでパスを表示。 | プリントしたサーボホーン試作品。 0.1mmづつサイズを変え4つ穴を空けている。 |
PLAの印刷不調は、フィラメントが 途切れて印刷失敗ということが 複数回発生。湿度のせいで フィラメントが脆くなっているのかも しれない。夏はABS,冬はPLAが良いということか? フィラメント切れ検出機能付き 3Dプリンタも欲しい。

3Dプリンタ(Qidi X-Smart)はステージが上下するタイプ なので、カメラを高い位置に設置しないと 様子がロクに見えないのが悩ましい。 いろいろ検討した結果、 3Dプリンタ正面の透明なポロカーボネイト製パネルに 穴を開け3Dプリンタで製作したホルダーを ネジ留めすることにした。
3Dプリンタのノズル交換後, ホルダーをプリント、パネルにドリルで穴を開け ホルダーをネジ止め、ATOM Camをバッチリ固定できた。
 |
 |
 |
| 設計したホルダー。 ホルダーばかり作っている私もホルダー職人。 | 前面パネルに固定しているので、パネルを上げるとカメラも動く。ネジ長すぎ。 | iPadで3Dプリンタの状態を確認。表示しっぱなしでも問題ない。 |
せっかく良い位置にカメラを固定できたので ATOM CamでTime Lapseを撮ってみた。
作っているのは、ダイソーの両クリップのメモホルダーを 固定する台。例によって磁石付き。 あまりTime Lapse映えしないが、 机の上のiPadで3Dプリントの様子 見れるのは便利だ。
 |
 |
 |
| プリント結果 | 磁石を固定 | メモクリップ立て |
このところBlogの更新が頻繁なのは、 たまたまネタが連続して発生したタメ。 毎日更新を目指しているわけではない。

これは、もう、ノズル交換の時期だろう。 購入後1年経ったし、最近はPLAを高温気味(220度)で 使ってたから煤が詰まったのかな、などと思いつつ 交換の方法を調べる。
使用している3Dプリンタは Qudi社のX-Smart。 購入時に工具とスペア部品が入った 修理キットが付属していた。 付属品のUSBメモリには、説明書と 修理方法の動画ファイル(mp4)があり、 感心なことに、ちゃんとPCに保存していた。 動画通りに作業し、簡単にノズルを交換できた。 古いノズルには、煤っぽいものが若干あるようにも見える。
 |
 |
 |
| プリンタ付属の修理キット。 工具と交換部品など。 | ヘッドを取り出す。 汚い。 ヘッドを回転時に本体固定用のネジまで付属。 | ノズルが新しくなりました。 |
交換後、テストプリントを実施。 キレイに印刷できることを確認できた。
プリントしたのは、 ATOM Camを アルミフレームに固定するホルダー。 窓の内側から外を映せるよう1台設置しているのだが、 カーテンと窓の間にあるので、 カーテンをいじると向きが変わったりする。 それが嫌なので、ホルダーを作成した。 ATOM Cam付属の丸い鉄板をネジ止めしてあり、 ATOM Camを磁石で固定する。 台座にはフチを付けているので、台座は回転しないはず。
 |
 |
 |
| きれいにプリントできました。 | Atom Camをアルミフレームに固定するホルダー。 | 設置状態。 |
3Dプリンタのノズルの交換が、思ったより簡単にできて 感心した。長く使って行けそうだ。 追加の 交換用ノズルをAMAZONに注文した。

斜め平面が2つあるので、 作成方法に悩んだが、 論理演算を駆使し作成した。
使ってみると大変良い。 iPad Proの差し込みが、大幅に楽になった。
 |
 |
 |
| 改良前のiPad Proスタンド | 今回、作り直した部品。 左が改良前、右が改良後。 |
改良後のiPad Proスタンド。 格段に挿入しやすくなった。 |
3Dプリンタは、寒くなり、ABS樹脂のプリントが 難しくなってから、 温度センサーの設置は行ったものの, 温度低下の対策も行うことなく、 3Dプリント自体を行っていなかった。
暖かくなり、ABSのプリントも問題なくなるとおもわれるので、 ぼちぼち、いろいろ印刷して行きたい。

温度センサーは、Amazon等で安く売っている ステンレス管入り防水DS18B20を使用する。5個で1050円。 マイコンは手持ちの関係で OLED付きESP-WROOM-02(ESP8266)マイコン HSES-NODE-OLED。 で、ステンレス管入りのDS18B20を見ているうち、 ホルダーを作ったら便利だし、カッコいいのではないかと 思いつき、作ったらやっぱりカッコよかったという話。
今回のホルダーはサポートなしで印刷。 穴は若干の対策を施し問題なし。 PLAだとサポートの取り外しに苦労していたので、 サポート無しでプリントできるのはありがたい。 作り直しは1回。隙間の大きさを見誤った。 拘束が(たぶん)適切に入っているので 寸法の修正だけで修正できた。
スチール製のケースに入った3Dプリンタ周りに取り付けるため、 ホルダーには皿穴付きネオジム磁石が取り付けてある。 マイコンを固定する Grove Wrapperにも 磁石が取り付けてある。
 |
 |
 |
| Fusion360で設計 | センサー5本 ホルダーがカッコいいと思う。 |
DS18B20のケーブルには3PのQIコネクタを取り付け 基板に接続 |
 |
 |
 |
| ホルダー背面には皿穴付きネオジム磁石 | HSES-NODE-OLED | こちらの背面にも磁石 |
プログラムはds18B20で温度を計測できるところまで作ったところで、 未完成。プログラムの進みが遅い理由を挙げると
Arduinoのプログラミング環境として platformIOの名前は前から聞いていたが 食わず嫌いで全く調べていなかった。 で、なんか VSCodeで使える。 pythonで書かれているとか聞いて 試してみたら、コンパイルはMakefile並に早い。 プログラムの書き込みもできるし、シリアル端末も使える。 そこまでは良いのだが、VScodeのc++環境(intelliSense?)の 設定がよくわからない。 ソースファイルを開けませんとかエラーが出る。
c_cpp_properties.jsonの設定が必要だということが判明し、 さらに PlatformIOのPROJECT TASKSのRebuild IntelliSense Indexで このファイルを設定してくれることがわかった。 いいかげん、ちゃんとプログラムを完成させ温度を計測しよう。
このホルダーを作った後に HSES-NODE-OLED + HSTS-ATD7410 x 4個の構成でも 温度計測できることに気がついた。 こちらの構成だとGrove Wrapperで全部固定できるので、 新たにホルダーを作る必要はなかった。

改良点は以下の2点。
現状で、充分使える状態ではあるが、不満点はある。
作り直しに時間がかかった理由の1つは、 寒くなり、ABSをプリントしたものが激しく反るように なってきたため。 結局、ABSではなくPLAで印刷することになったが、 PLAは3Dプリンタを購入した直後に小物を少し作っただけで すぐにABSに移行したため質感に慣れていない。 ABSより硬いイメージ。反らないし、正確にプリントできるのかも しれない。 今後は他の材料 PETGやTPUなども試して行きたい。
 |
 |
 |
| iPad Proがない状態。 黒く見えるのは iPhone7用スタンド | 背面。 Apple Pencilも挿し、充電できる。 | Google Nest Miniを貰う。 |
YouTube有料メンバーシップ登録者にプレゼント ということでGoogle Nest Miniをもらう。 Amazon Echo Dotをすでに持っているので、 用は足りているが、 Google Nest Miniにできることも知りたいので 試しに使ってみようと思う。
DEATH STRANDINGは、クリア後の世界を楽しんでいる状態。 カエラル通信未接続エリアは解消、 国道も全復旧、欲しいZIPラインも大体接続したので、 あとはどこまで依頼を消化しようかと思っているところ。

となると、コントローラは床に転がして使うしか無いが、 操作性が悪いので3Dプリンタで作ることにした。 固定は、余っているネオジム磁石をたくさん使って、 スチール机に着けることにする。
いつものFusion360で設計し、PLAでプリント。 温度の設定がよろしくないのか、サポート材の取り外しが面倒。 サポート無しで印刷できるようすべきだった。
 |
 |
 |
| 購入した足元ヒータ | 付属のホルダ。 引っ掛ける場所が無い。 |
製作したホルダ。 20x10x3mmネオジム 磁石6個の勇姿を見よ。 市販品では、まぁあるまい。 |
 |
 |
 |
ABSでなくPLAを使ったのは、寒くなって ABSのプリントの調子が良くないから。 やたらと反ってしまう。 ヒートベッドの故障を疑ったが、発熱はしている。 ネットで調べると、寒くなるとABSは反りやすいという 話があったので、納得した。 PLAを試すと問題なかったので、当面はPLAで行こうと思う。
プリントが完了し磁石を取り付けると強力にスチール机に 固定された。使用している磁石は 20x10x3mmの皿穴付き ネオジム磁石(国内製)を6個。 全部同じ極性なので、隣り合った磁石をネジ止めする時は、 反発力が結構あり若干苦労する。 値段は1個100円ちょっと。 AliExpressでも安く売っているが、中国製は若干脆い気がする。 何個か割れたことがある。 皿穴つきネオジム磁石は、磁石を皿ネジで簡単に固定できるので 大変便利なのだが、100円ショップで売っているネオジム磁石と 比べると割高感があるので、いつもは100円ショップの方を使っている。 しかし強力な磁力が欲しい時は、皿穴付きのほうが良いと再認識した。

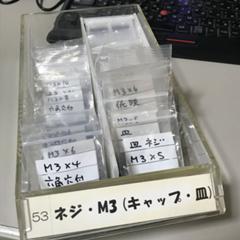
チップ部品のテープを整理するケース。 良く出来ていて実用品という感じがする。 私もリフロー炉とか導入したら作りたい。
この動画で好感が持てるのは、 苦労した点・工夫したを過不足なく良いテンポで紹介している点。 ケースにテープがうまく付かないので、 ヤスリで削って見たり、 アセトンで表面を溶かしてみたりして、 結局 塗料を塗るということに落ち着いている。 台の安定のため鉄のフラットバーを仕込んでいるところなど 実用という感じがする。
タイトルを読まずに動画を見ていたので、 単なるターンテーブルだと思っていたら、 なぜかサーボが1個入っていて謎だった。 見続けるとリモコンのスイッチを押して カメラのシャッターを切るためのサーボだと判明。 撮った写真は Autodesk ReCap に読み込ませる。 単なるターンテーブルとしても使える。
この動画に設計に突飛なところは無いが、 設計が安定しているというか、自然というか、 よく出来ている感じする。
Arduinoを含め殆どの部品は ELEGOO UNO R3 Project Most Complete Starter Kit 5,950円 で揃うらしい。安いよね。
実は自分でもターンテーブルを作っていて、 ハードは完成しているのだが、 ソフトが面倒で出来ていない。 Arduinoを避けて PIC32を使ったのが間違いかも... Arduinoだとライブラリで済むところも 自分でつくらなければいけない。
ArduinoだとIDEが使いにくいとか、 AtMega328Pが16Mhzとかどうよなどと 考えてしまう。 ESP8266,ESP32だと割と使いやすいが、 WiFiが不必要な環境では使いたくない。 もっとArduinoで使いやすいCPUを探そうか...
魅力的な写真に惹きつけられ動画を見る。 acupuncture という単語を知らず、 なんの針を使っているのかわからなかったのだが、 単語の意味を調べ 鍼治療用の使い捨ての針ということが判明。
HPにある リンクを見ると 1箱100本で700円ぐらいと安い。 しかし、 Does'nt post to Japan などと書いてある。日本のサイトで調べてみると 医療従事者でないと購入できないようだ。
動画を見ていると、作っているものも良いが、 環境の素晴らしさに目が奪われる。 まず、広い。大型モニターだけでも8台見える。 あと大きなアームに取り付けられた実体顕微鏡。 HOZANだとL-519相当か。 51,920円。 ものすごく高いわけでもないのか。

苦戦した理由その1は、大きさ。 iPad ProはiPhoneと比べて大きいので、 スタンドもでかくなり、 各部品の印刷に時間がかかる。 一番大きな部品で5時間ぐらいかかるので、 試行錯誤のサイクルが長い。 あと、私の3Dプリンタでは 140x140x140mmまでしか 印刷できないので、余計な部品分割も必要になる。
苦戦した理由その2は、iPad Proが 斜めになっていること。 斜めになっていると、寸法の計測等が 難しい。iPadの位置も、最初の設計 から2mmずれていた。
ちなみに スタンド上のiPadの傾きは 75度。 垂直から15度ずれている。 この角度を測るのに、分度器を探したが みつからないので、 オンライン分度器 というサイトを利用させてもらった。 写真をアップロードし、分度器画像を重ねて表示し 角度を測る仕組み。面白いアイデアだ。
出来上がったスタンドは一応使用可能な状態になった。 iPadを挿せば保持できるし、Lightningコネクタも刺さるし、 レバーで外せる。
 |
 |
 |
| iPhoneスタンドにiPad Proを刺し
写真を撮って、角度計測。 オンライン分度器を 利用させてもらった。 |
前面。 iPhoneスタンドが中に入っている。 中央のレバーを押すと i PadがLightningコネク から外れる。 | 背面。 |
不満、未完成な点は以下の3点
使い易いのではないかとレバーを前に配置したが、 iPhone ホルダーと同様に背面配置の長いレバーの 方が良かったかもしれない。
Homeボタンを押しづらいのは予想外、 使ってみるまで気が付かなかった。
Apple Pencilスタンドは、充電可能なものを 以前から作りたかった。iPad Proスタンドと 一体になっている方が良いように思う。
次は、Apple Pencilスタンドの試作などを ぼちぼち始め、気が向いたらスタンドの作り直しも したいと思う。

iPhoneを置くだけのホルダーならば何の難しさもない。 問題は充電ケーブルの抜き差し、 ホルダーに置けばケーブルが刺さり、 ホルダーから取ればケーブルが抜けるようにしたい。 ケーブルには押したり引いたり力が加わるが、 それでもずれたり外れたりしないよう固定しなければ ならない。
その辺を考慮しつつ 試作品を作ると 何の偶然か、丁度、嵌め合いの良いものが できた。ケーブルがバッチリ固定され、 ホルダーへの抜き挿しでケーブルも抜き挿しできる。 ただし、挿す方は軽い力でできるが、 抜く方に力が必要。ケーブルを外すのには力が必要なのだ。
これをレバーで軽く外せるようにすれば完璧! なのでレバーを追加。 何回かの試作の後、ちゃんと動作するものが出来上がった。 ちゃんと使えることに感動した。
構造がわかりやすいよう、fusion360で組立アニメーションを 作成してみた。クリックすると大きく表示される。
設計データは、いつものように Thingiverseで公開 しているので興味がある人は見てほしい。
 |
 |
 |
| 邪魔だ | これでも邪魔 | 設計 |
 |
 |
 |
| ケーブルの固定に工夫 | 全景 | 装着状態。 後ろのレバーで外せる。 |
点列をベジェ曲線に変換する方法を ネットで検索するが、簡単には見つからない。 TensorFlowを使う方法や 最小二乗法を使う方法 (媒介変数tの値が解れば最小2乗法で解けるらしい) などに翻弄されつつ、 stack overflow 経由で 1990年に出版された本 Graphic Gems のプログラム FitCurves.c に辿り着く。 ソースも github で公開されている。 コンパイルすると、ちゃんと動いた。
そのままでは使いづらいので、自分でpython化した。 できあがったのが こちら。 numpyを使ったので、割とコンパクトになったのでは なかろうか。 点列をベジェ曲線の制御点列に変換する。 なかなか便利な気がする。他の用途にも使えそうだ。
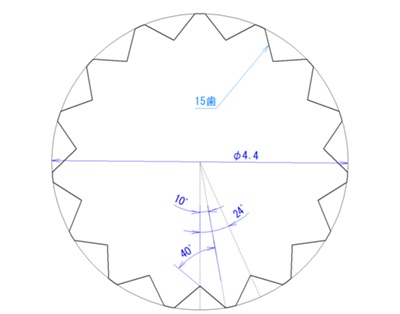
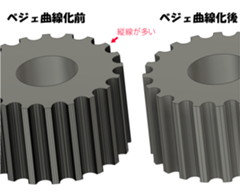
出来上がったプログラムは githubに公開している。 今回のプログラムでは、 ベジェ曲線化するため、 なるべく単純な曲線を扱いたかったので、 プーリー形状が歯ごとにおなじ形の繰り返しであり、 その形も左右対称であるので、歯の半分の形状を生成、 それをベジェ曲線化、さらに倍にしたのち歯数分コピー という手順で作成した。 このため曲線の数は歯数の2倍の数の倍数となる。 例えば20歯のプーリーの曲線数は40の倍数になる。
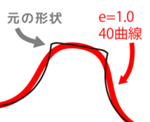
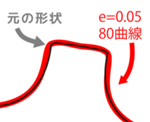
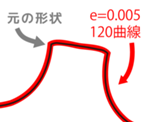
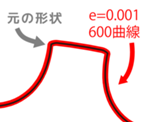
以下にベジェ曲線化した歯型と元の歯型を比較した図を示す。 ベジェ曲線化の程度は、許容誤差(-eオプションで指定)で変化する。 許容誤差を大きくしても曲線の数は40より小さくはならない。 見た感じでは、許容誤差0.05mm, 曲線数80ぐらいあれば充分のような 気がする。 今回のプログラムでは、処理が複雑になるので、オフセットの設定は できなくなっている。
 |
 |
 |
| 一番条件をゆるくした歯型 歯頭から歯底まで1本のベジェ曲線で描かれている。 これでも使えたりして... |
歯頭から歯底まで2本のベジェ曲線。 これで充分ではなかろうか。 |
歯頭から歯底まで3本のベジェ曲線。 これで充分。 |
 |
||
| 歯頭から歯底まで15本のベジェ曲線。 意味ないよね。 |
生成したsvgファイルをfusion360に挿入すると、 以前のものより処理が軽い。ほとんど問題にならない感じである。 20歯、40歯、60歯のプーリーを試作し、タイミングベルトとの噛み合わせ を確認したが、問題は無かった。
 |
 |
 |
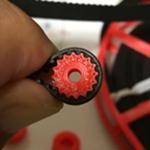
| 20歯、40歯、60歯のプーリー試作 | 噛み合わせ問題なし。 | なんとなく作ったプーリーの使用例。 12歯を使用したが小さすぎた。 プーリーが小さいとベルトを曲げるのに 力が必要になる。 |
プログラムの残りの課題は、前述のオフセット処理と高速化である。 そのうち、気が向いたらやってみたい。

タイミングペルトがあれば、ギアというか歯付きプーリーも必要になる。 とりあえず手持ちで20歯のものが4個あるが、3Dプリンタで自由に作れると大変嬉しい。
ギアのように、生成プラグインや歯型生成の方法があれば いいのだが見つからない。ベルトの形状はわかっているので、 多角形で近似して、多角形同士の論理演算のライブラリがあれば、 多角形でプーリーの形状が得られるのではないか?と フリーの多角形論理演算ライブラリを探すとあった。
複数見つかった中 Angus jhonson's Clipper library には pythonバインディングがある。 サンプルプログラムを試したら動いたので、 これを使う。
まず、タイミングベルト2GTの形状を作成する。 2GT 図面で検索すると いろいろみつかるが、 ミスミのページの図面がわかりやすかったので、 これを元に製図し、必要な座標、角度等を求め、 形状生成のプログラムを作成した。 次にピッチ円状に沿ってベルトが回転しながら、 ピッチ円からベルト形状を切り取ることで プーリーの歯型を生成するプログラムを 作成した。 SVGファイルが出力される。 プログラムは github で公開している。
 |

|
 |
| プーリー形状生成処理のイメージ。ベルトの歯型でピッチ円を削って行く。 | ゲイツ・ユニッタ・アジアのGTベルトのページにあった gifアニメーション。イメージがわかりやすい。 | 出力されたsvgファイルをFusion360で読み込んだところ。原点から下に伸びる直線の長さが10mmであることを確認 |
生成したSVGファイルをFusion360で読み込み、 赤い棒が10mmであることを確認。 直径5mmの穴を追加し、押出でプーリーを試作。 歯型を生成する際、オフセットを指定し、 指定分だけ内側に縮めて作成できる。 オフセットなし、0.1mm, 0.2mm, 0.3mmの4種類で 20歯のプーリーを印刷してみた。 ベルトと噛み合せた結果 オフセットなしが最も良好。 0.1mmも噛み合うが、0.2mm, 0.3mmは隙間が大きくて 噛み合わないことがわかった。
 |
 |
 |
| Fusion360で押出 | オフセット 0~0.3mmで4種類試作 | オフセットなし、ばっちり噛み合う。すこしテンションをかけた方がよく噛み合う感じ。 |
 |
 |
 |
| オフセット0.1mm。噛み合う。もうすこしオフセット少なめでも良さそう。 | オフセット0.2mm。隙間多い、噛み合わない。 | オフセット 0.3mm。山も低いし、隙間も多い。噛み合わない。 |
次に、どれくらい小さいプーリーも使えるか 調べるため、オフセット無しで 16歯、14歯、12歯、10歯 のプーリーを印刷。 実際に使えるかどうかは、わからないが 10歯までベルトと噛み合わせることができた。
 |
 |
 |
| 10,12,14,16歯、4種試作 | 16歯、問題なし | 14歯、問題なし |
 |
 |
 |
| 12歯、問題なし。 ここら辺まで使えそうな気がする。 | 10歯、噛み合ってはいるが、本当に使えるのだろうか?ベルトをこんなに曲げて良いのだろうか?試してみたい。 | 5mのタイミングベルトを巻くための自作リール。 パーツケースに収まるように長円形にしている。 |

次はベルトとプーリーを使って動くものを作りたい。 あと、現状のプーリー形状はなかなか重い。 20歯で1000頂点を超える。Fusion360での押出処理も重い。 歯数が多くなると、もっと重くなるので、 頂点を減らす処理も検討したい。

探すと色々あるのだが、特に3Dプリンタ関連の部品が安い。 シンクロベルトを物色すると 3Dプリンタで使われているのは 6mm幅の2GTらしく、 いろいろ売れらてている。 5mのものを注文し、届いたら作り始めようと 思っていたら、なかなか届かない。発送したとかの メールも届かない。確認したらカートに入れただけで、 注文してなかった。
気を取り直し、アマゾンで探しているみると 5mのベルトに20歯のプーリ4個とテンショナー用 バネ2個付きのものが766円であったので、 注文。ちなみにAliExpressだと 同等のものが $3.42、 5mのベルトだけのものが $2.81だった。

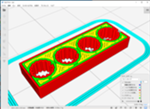
そのままでは 手持ちのジャンパワイヤにサイズが合わなかったので、 サイズを調整し色々プリントしていたのだが、 そのものを置く適当な場所がなく、 納まりが悪いので 使わずじまいになっていた。
先週、3Dプリンタを移動した際に 小型のパーツケース(HOZAN B-103)を 机の横に移動したので、こいつに入らないかと 試すと、サイズ感が丁度いい。
パーツケースの仕切りをいれるスリットで 間隔調整ができるように設計をし直し、 さらにジャンパワイヤの種類・色を明示できる ラベルを貼るパネルを追加したり、 して完成。 パーツケースのスリットに微妙なテーパーがついていることに 気が付かず試作回数が増えた。
 |
 |
 |
| ThingiverseにあったDupont Cable Organizer Cusomizable, Thingiverse上で寸法等を変更可能。 | 設計データ。これを2組つくる。 | パーツケースに入れてみる。 反対側にもラベルがないとケーブルを指す場所が分かりづらいと気付き、このあと追加。 |
 |
 |
|
| 櫛2つにパネル1、プリントアウトしたラベル1。パネルとレベルはこのあと追加。 | 手持ちのケーブルを入れてみました。 |
手持ちのジャンパ・ワイヤを入れてみる。 長さが揃っていないといけないので、 ジャンパ・ワイヤを選ぶ。 今回は、 スイッチ・サイエンスで売ってあるQIコネクタが付いた 長さ155mmの奴に合わせている。 各スロットに4本挿入可能。 パーツケースの高さには余裕があるので、設計しなおせば 倍ぐらいまでは増やせそう。
データは Thingiverseで公開。

3Dプリンタで物を作る時、柔軟性というか 柔らかさが必要な部分は 素材、ABSの弾性に頼っている。 そのため、 なんか余裕がない感じになっていたりしているのではないか。 バネを使えば良い感じに作れるのではないか。
そこでバネの入手方法を調べた。 仕様(形状、応力等)が決まれば ミスミや モノタロウで割と安く入手出来る。 しかし、試すには、ある程度種類を事前に 持っておきたい。 アマゾンで バネセットを発見。 価格は1000円前後。 AliExpressも確認すると 数ドルであまりかわらない。 アマゾンから サイズが小さそうで 圧縮バネと引張りバネが 入っているものを購入。 今後、活用していきたい。
3Dマウスは 3Dconexion SpaceMouse Compact SMCを購入。 Fusion360で使うのが目的。 ちゃんと使えるようになりたい。
 |
 |
 |
| バネセット。中央の長いバネとか使わなさそう。ケース入りは良いよね。1000円なら文句なし。 | 3Dマウスの箱。高級感... | 3Dマウス。重量感... |
3Dプリンタを使う上でネックになっているのが騒音。 それほど大きい音ではないが、机の横にあるので 印刷中はうるさい。集中力が削がれる。就寝中にプリントすると寝づらい。
騒音が気にならない場所に移動させることを検討中だが、 近くにあるメリットもある。 プリントの終了がすぐにわかること。 LAN経由で印刷データを転送でき、SDカード等が不要であること。 3Dプリンタを見ると使いたいと思うこと。
まぁでも、いちど移動させて試してみよう。ダメだったら戻そう。
Youtubeで 3Dプリンターでラジコン飛行機を作る!を見て WKWK-3Dという チャンネルを知る。 up主はデザイン&機械系の大学生だそうだ。 この辺の動画を見てると、 工作系やっているのに3Dプリンタ持ってないとか アリエナイなどと思えてくる。 自分も4月までもってなかったわけだが....
写真から3Dモデルを作るとか 3Dマウスの動画も参考になった。 3Dマウス、 Fusion360で使えるのか、 2万円ぐらいか... ,欲しい。 TPUフィラメントも使ってみたい。

普通に使うと、視野が暗いので、 照明が欲しい。 昔作ったことがあるのだが、 今は LEDクリップライトを 適当に配置して照らしている。 毎度毎度セットするのも 面倒なので、3Dプリンタで 専用照明を作る。
電源を繋ぐは面倒。 電池式にしたいが、何本も 使いたくない。1本からの昇圧タイプにしたい。 秋月の1.5V電池☆白色LED投光キット を使うと楽そう。購入し組み立て。 現物の顕微鏡にあてて、配置を検討すると 鏡胴の奥にぶら下げると良さそうに見える。 そのためのフックを3Dプリンタで作成する。
出来上がったものを組み立て、 組み合わせてみると、計測抜けで 干渉する部分もあるが、取り付けは可能。 完成ということにする。 1灯式だし、これで良いかわからないが、 しばらく使ってみて、具合が悪かったら、 また作り直すとしよう。
 |
 |
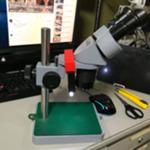 |
| Fusion360で設計 | 秋月のLED投光キットと取り付けフック | 顕微鏡に取り付けた状態。斜めになったのは設計ミス。 |

基板各所の寸法を計測し、 鍋CADで図面に落とす。 鍋CAD上で基板を覆うような形で、 ケースの形状、寸法を決め、 DXFファイルでFusion360に移す。 Fusion360で形状の追加、調整を行いデータ完成。
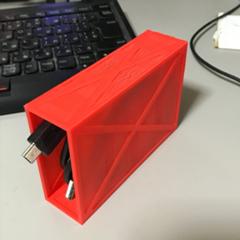
1回目のプリント中、フィラメントを使い切る。 他にも間違いがわかったので、赤いABSのフィラメントに 切り替えて印刷。 フタのサポートが付いた側の面が 汚いので、フタだけサポートが内側になるよう 印刷し直し、M2のナットをハンダごてで埋め込んで完成。
 |
 |
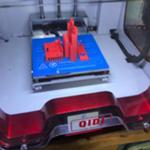 |
| Fusion360で設計。3つの部品になりました。 | 1Kgの透明のフィラメントを使い切り、赤いフィラメントに交換。 | 赤いフィラメントでプリントすると何か新鮮に感じる(当社比) |
 |
 |
 |
| こんな感じです。フタにM2の埋め込みナット。底面に磁石を装着。 | ダイソーの13mmネオジム磁石 | 裏からM2の皿ネジで固定 |
 |
 |
 |
| USB端子 | USB端子の穴。もっと塞ぐべきだった。 | 磁石で固定 |
形が変なのは、モジュールをピンヘッダで取り付けたたのと スイッチ・LEDの配置をちゃんと考えていなかったせい。 全体を小さく作り直したい気持ちもある。
ダイソーの直径13mmのネオジム磁石を埋め込んだので、 邪魔にならない位置に常時置いておける。予想以上に 便利だ。
Adafruitのケースの作り方の動画とか見て 今は普通に3Dプリンタでケースを作る時代なのだと 実感する。
急に基板の3Dデータを出力できる基板CADに 魅力を感じ始める。 KiCAD ? DesignSpark PCB? 使い慣れたEAGLEから移るのツライのよねぇ。

今回、業務でテストのためXHコネクタを頻繁に 抜き差しする必要が発生。4ピンなので、 あまり固くはないが、それでも、ついつい ケーブル部を掴んで外しがちで、ケーブルが 抜けそうだ。
ヤバイので3Dプリンタで XHコネクタ抜きを作成することにした。 JSTのサイトからXHコネクタの3Dデータを ダウンロード。 Fusion360で読み込み、それに合わせて 形状データを作成、プリントアウトすると 一発で使えるものができた。
はめ込んで、軽くひねるだけで外せる。ケーブルには一切負担がかからない。 いろんなピン数に対応できる 汎用品を作るのは難しいが、 これなら、必要になった都度、 プリントして使っても良さそうだ。
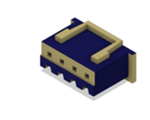 |
 |
 |
| JST提供3Dデータ | 設計したXHコネクタ抜き | 噛み合せたところ |
 |
 |
 |
| 指で外すのはツライ。ついケーブルに力をかけてしまう。 | XHコネクタ、赤いケーブルがヤバイ | XHコネクタ抜きならラクラク抜ける。 |
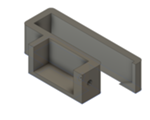
前から作りたかったが、磁石の保持方法に悩んでいた。 ネジでフタをすれば良いんじゃね?と思いつき作ってみた。
ネジはFusion360のネジの機能で試してみたのだが、 3Dプリンタで厚く出力される分を補正する機能がなく、 雄ねじと雌ねじを噛み合わせることができない。
ネットで調べたら「コイル」コマンドで隙間を調子しつつ、 ネジを作っている人がいたので、私も同じやり方でやってみた。 (しかし、今調べたら、ネジ+プレス/プルでも 隙間の調整ができるらしい。 今度、やってみよう)
で、試行錯誤しつつ、なんとかできあがったので使っている。 今回の使用目的は iPhone/iPadの充電ケーブルの保持、 使用していない時に近くに止めておくため。 目的を達成することができた。
考えてみれば、別にネジでフタをしなくても、 嵌め合いとか接着とかナットみたいに熱して押し込む とか、磁石を固定する方法は、いろいろ方法がある。 しかしネオジム磁石のキュリー温度は315℃だそうなので、 熱するのは気が引ける。
 |
 |
 |
| CADデータ。全体像 | 底、穴に磁石(直径6mm,厚さ3mm),ダイソーで売ってるやつが入る。 | フタ。 |
 |
 |
 |
| 組んだ状態。14mmのスパナで回せる。 | いろいろ作りました。 | 使っているところ。ホルダーが落ちないよう、ケーブルに結束バンドを付けている。 |
今回のデータも Thingiverseで 公開している。

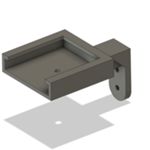
このため、「あれくさ」認識後のLEDの点灯は 重要な情報なのだが、現在のDotの置き場では 寝床から見えない。不便なので、 エレクターもどきのパイプ棚のパイプに 固定すべくアタッチメントを 3Dプリンタで作ることにした。 楽しそうだ。
いつもの鍋CADで設計後、 DXFファイルをfusion360で読み込み立体化、 さらにネジ穴加工をしてデータは完成。 4時間ぐらいでプリント。
組立取付は1発成功。 USBコネクタも穴を通った。 あっさり使えるものができて感動した。
データは、 Thingiverseで公開。
 |
 |
 |
| Fusion360での設計データ | プリント完了 | 仮組立 |
 |
 |
 |
| ちゃんとハマる。 | M5ネジでパイプに固定 | USBコネクタを刺し、起動 |
完成後、 カッコいい壁マウント の存在を知る。 この形にすれば、もっとスマートに作れたなと反省。 が、今の物でも十分使えるので満足。

今回のテーマは埋め込みナット。 海外の動画で 3Dプリンタの生成物に 埋め込みナットを取り付けた場合の 強度評価を行うものがあった。 結果としては充分な強度だったのだが、 埋め込みもハンダゴテで簡単に できるし、仕上がりもカッコいい。
これは是非導入せねばと、アマゾンで M3のものと M2のものを各200個購入。 1個あたり約4円。 で、基本的な実験などしつつ、 使う機会を伺っていたのだ。
 |
 |
 |
| 完成したケース。ラベルも貼っている。 | M2の埋め込みナットと試作品。 | ケース下部のモデル。 |
 |
 |
 |
| USBIO基板のモデルを載せたところ。 | ケース上部のモデルも載せる。 | 埋め込みナットのためのスペースが不足気味だったが、充分固定できた。 |
で、わかったことは、以下の3点。
M2のネジと埋め込みナットを使うと、 ケース類をコンパクトに作ることができる。 今後も活用していきたい。
設計データは Thingiverseで公開している。
写真が足りないような気がしたので追加。
 |
 |
 |
| 埋め込みナットのテスト。余裕が無い穴にナットを埋め込んだら溶けた樹脂がナットの穴に侵入。樹脂が逃げる空間が必要。 | USB端子の穴と背面のM2皿ネジ。端子の穴サイズは1度修正(大きくした)。皿ネジは良い感じ。 | はめあいがうまくないのか、隙間が目立つ。今後の課題。 |

で、可能な限り、プリントする部分を減らそうと努力する。 すなわち、肉抜きを行う。
しかし、肉抜きにも問題がある。サポート材が必要になるとか、 プリント時に失敗しやすくなるとか、見た目が悪いとか。
今回、うまい肉抜き方法を思いついたので、報告する。
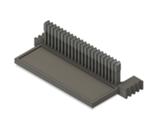
プリントしているのは、部品ケースの仕切り板。 部品ケースを縦に2分割し、 50x70mmのチャック付き小袋を並べて 置けるようにするもの。
 |
 |
| 部品ケースの仕切り板を3Dプリント。50x70mmのチャック付き小袋を並べて収納できるようにするのが目的。 | いろんな形の仕切りをプリントして試した。 |
底面は、大きな穴を開けても問題ないが、側面はサポート材なしで 印刷できるように穴を開けなければ、サポート材の印刷にも時間が かかるし、サポートを外す際に壊れたりもする。 肉抜きの効果を上げるため、構造を細くしたり、穴を大きくしたり したいが、そうすると出来上がりがもろくなったり、プリント時に ヘッドに蹴られて折れたりもする。
そういうわけで、悩みつつ、色んなデザインを試していたのだが、 ある時、思いついた。サポート材代わりに極薄の膜を印刷してやれば いいんじゃね?
私の3Dプリンタで印刷できる厚さの下限は 0.5mm, これを厚さ2mmの側面の穴の中央に配置する。実際に試してみると、 プリントが凄く安定しているし、見た目が良い。 ということで、当面、これでプリントしていこうと思う。
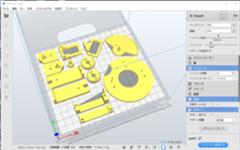
最後に肉抜きによって、どれくらいプリント時間と 材料を節約できるかスライサーの出力で 調べた結果を記す。半分ぐらいにはなってるかな。
 |
 |
 |
| プリンタ付属のスライサー Qidi Printで印刷時間と材料の量を確認。実際の印刷時間は、これよりも若干長くなる。 | 素の状態。厚さ2mm。 サイズは 100 x 55 x 48mm 。 印刷時間 4時間39分 材料 11.92m / 32g |
底面を抜く。 印刷時間 4時間9分 材料 9.07m / 24g |
 |
 |
 |
| 側面も抜く。サポートなし。 印刷時間 1時間49分 材料 4.38m / 12g |
薄膜(0.5mm)を追加。 印刷時間 2時間31分 材料 5.47m / 14g |
前の仕切り形状。サポート無し。
印刷時、支柱が1本ぐらい折れる。 印刷時間 2時間 1分 材料 3.62m / 10g |
今回の仕切り板、肉抜きのデータは、 fusion360のスケッチ・エディタで描ける自信が なかったので、 使い慣れた 鍋CADフリー版 で入力、 DXFファイルで書き出し、 fusion360で取り込んで、形状を作成した。

ということで、3Dプリンタでケースを製作した。
設計時考慮したのは、以下の3点。
試行錯誤の結果、こんな形に出来上がった。
 |
 |
 |
写真
 |
 |
 |
| 部品一式 | 合わせてみる | 底にネジ |
 |
 |
 |
| キャップ装着状態 | ラベル | 使用時、 キャップは後部に装着可 |
データは Thingiverseで公開中。 fusion360のデータも付けてます。
実用に耐えるものができたと思う。 で、実際に使ったかというと、 まだ使っていない。
ケース作りたいから買ったのではないかという疑惑が残る。



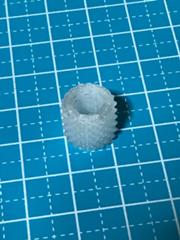
直径は20mmぐらい、 1/4インチ(6.35mm)より若干大きい円に 外接する正六角形の穴をあける。 装着しても、落ちないようにするため、 内部の爪で内径を小さくする。 外側には、滑り止めのため、 練習も兼ねてギザギザを作る。

実際作ってみると、サイズの調整等で 以外に手間取った。1回20分程度でプリント できるのだが、8回ほど作成した。 六角軸の穴は、直径6.6mmの円に外接するサイズ、 直径は、最終的に14mmになった。 ギザギザ加工のやりかたは、 fusion360 + knurlingで検索し 出てきた動画どおりにやってできた。 なかな複雑だし、処理も重いが、 ちゃんとできることに感心。
試行をくりかえしただけに、 出来上がったものには満足している。 データは Thingiverseで公開しているので、興味がある人は 作ってみて欲しい。

しかし、動きが思わしくない。 希望のイメージから遠い。 ゆっくりと定速で動かしたいのだが、 安いマイクロサーボだと、そう動いてくれない。

ということで、 今後は、もっと高いサーボとか ステッピングモータとかを試して行きたい。

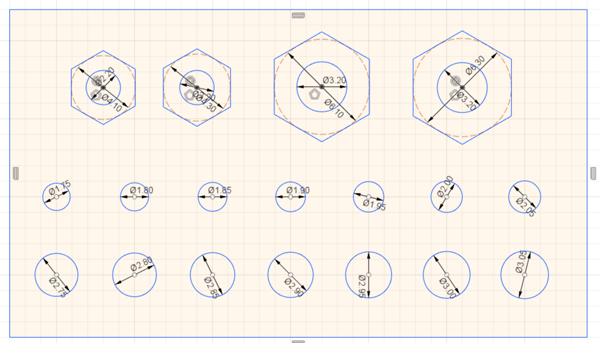
試したサイズは、M3用に 直径 2.75mmから3.05mmまで 0.05mm刻みで7個、 M2用にも同様に 1.75mmから2.05mmまで7個。 あと M2とM3のナット用の穴で それぞれ 直径4.1mm, 4.3mm, 6.1mm, 6.3mm の円に外接する正六角形の穴をあけた。
結果は、すべての穴がネジ穴として使用できた。 但し、最大のもの(直径2.05と3.05)は、簡単にバカ穴に なってしまった。穴径が小さくなると、 当然ながら、ねじ込むのに必要な力が大きい。 しかし、六角軸6六角レンチだけでも手で ねじ込める程度。
ナットの穴も、すべて使用できた。
今回のテーマは、以下の2つ。
カメラ台自体が、いつ完成するか、
わからないが、改良しつつ、
3Dプリンタと3DCADに
習熟していきたい。

考慮以外には、ネジ穴を使用し、 ナットが必要な場所を無くす、 ということを行った。
どのようなサイズの穴を開ければ良いか わからなかったので、Fusion360のHole機能で M3とかの正確なサイズネジ穴を作成した。
結果を言うと、これは失敗だった。 3Dプリンタで印刷すると少し太るので、 力を入れてもネジが全く入ろうとしない。 仕方がないので、M3のタップで少し削る 感じにしたところ、ネジが入り、ちゃんと 締めることができた。無理に力を入れなければ、 ネジ切れてしまう、ということはなさそうだ。
しかし、これでは手間がかかるので、 タップで削らなくてもネジが閉まる 穴のサイズを実験で探したい。

下の部分には、回路が入る予定で、
具体的には、まだ考えていないので、
なかなか、ちゃんと設計できない。
とりあえず、メカ的な動作確認が
できる分だけ作りたい。
今回、組み立てていて気がついたのだが、 ネジ、ボルトの干渉がやばい。 組み立てられないかと思ったが、 今回はギリギリセーブだった。
ネジ・ボルトもCADに入力し、干渉や、 在庫の有無等を確認する必要があると 痛感した。

まずは、六角軸の六角レンチ。 これまでは、普通のL字の六角レンチを使っていたのだが、 アルミフレームの組立等で、頻繁に使い、 回しづらい、と気がついた。 回転させるのに、L字の回転軸でない側が凄く邪魔。 力を入れる場合には、そこを使うわけだが、 力を入れず、高速回転させる時には、 ひたすら邪魔でしょうがない。
そこで、六角軸のレンチを 指で掴んで使ったところ、 非常に回しやすい。 指の力で十分締め付けることもできる。
最初、近くのホームセンターで短いタイプのものを 購入したが、長いのも欲しくなったので、 通販で購入した。
次は、六角軸のドリル。 六角軸のドリルは、昔、金工で使い、 対象に強く押し付けたら、六角の取付部が 曲がってしまったという経験があり、 印象が良くなかった。 しかし、3Dプリント物の穴の補正で ドリルと通す作業をするうち、 手で回すんなら、六角軸ドリルが 使いやすいんじゃない? 100円ショップで売ってるし、 ということで購入。手で使うには、大変具合がいい。 ということで、現在 2mm, 3.2mm, 4.5mm を持っている。 2.5mm、6mmも欲しい。
最後に右にあるオレンジのが、 ダイソーで買った、六角軸のラチェット式ドライバー。 六角軸を指で回せない時に使用。 超便利。 108円とは思えない。
六角軸のタップドリルとか、面取りカッターとかも欲しい。 買うだろうなぁ。

昔, Tilt Pan Kit というヤツで 遊んだこと がある。 ギアとか使えば、もっとしっかりしたものが 作れるのではなかろうか。
で、 Fusion360で設計を行うのだが、 現物無しで設計を続けるのが辛くなり、 とりあえず、形にしてプリントアウト したのが、写真のもの。 いろいろ問題はあるが、 現物があると、改善方法のイメージがしやすい。
現状ナットを多用しているが、
ABSに適当なサイズの穴を開ければ
代用できそうな気がする。
見栄えの良い、カバーなども作りたい。
まずは、サーボを動かしたい。
やはりArduinoか。
六角穴付き皿ネジとかも欲しくなってきた。
仕方がないのでFreeCadを使い始める。 こちらも、使い方を覚えるのに苦労したが、 なんとかDXFも読み込めるぐらいまでにはなった。 しかしDXFはFusion360の方が楽だ。
とりあえずFreeCadで 手持ちのマイクロ・サーボの 形状を入力してみた。まぁいい感じだ。これを 参照しながら、いろんな形状を入力できれば いいのだが。
次はfusion360のアセンブリ機能を試してみたい。 リンク機構を動かしてみたり、できるのかな?
右の画面は、FreeCadのデータを .step形式で エキスポートし、Fusion360で読み込んでみたもの。 当然ながら互換性がある。 両方使えるようになりたい。
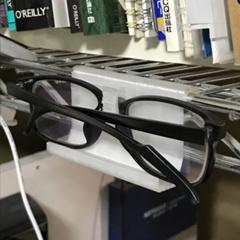
最初、小さいサイズで試作し、 修正を施し、大きくする。 もっと横幅を大きくしたいが、 これでも印刷に4時間かかるので、 まだ様子見。
使ってみると、安定感も掛けやすさも十分。 幅を広くしてもう1つ作ろうか。
メガネのツルをたためない状態でも掛けられるし、 レンズ面との接触が無いのもいい感じ。
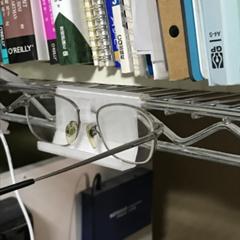

自分の生活環境に適した、フックや収納容器などを プリントするのが、満足感が大きい気がする。 実際に使うわけだし、 具体的に便利にもなる。
あと、アルミフレーム用の 部品も作ってみた。 写真のは 10mm角のアルミフレーム MicroRAX2本を直交させる部品。 こういうを必要に応じて作れるのも 便利そうだ。



ゲージがあれば便利そうだということで作成。
写真の左の物、スリットの位置を2mm間違えて失敗。 スリットの位置を訂正し、スリットの深さも、それほど いらないということで修正したのが右。 スリットの幅を大きくしたのは、4mmピッチの2個 格納されている高密度のテープに対応するため。 高密度のテープでは穴のラインにチップがあったりする。

このPLAのオレンジの色は サンハヤトの RB-5 リードベンダーを思い出させる。 私のテープゲージも、 サンハヤトの製品、とか言ったら 信じてくれる人もいるかも。

このゲージも、鍋CADで設計後、Fusion360に入力した。 プリントした後、鍋CADで週力したDXFファイルを Fusion360で読み込み、スケッチにする方法を覚えた。 これでFusion360へのデータ入力が格段に楽になる。

仕事で使っているRaspberry Piが、DSI(Display Serial Interface)経由 でLCDを接続していて、DSIのフラットケーブルがmicroSDカードの 抜き差しをすごく邪魔をする。 抜くのは、なんとかなるが刺すのが大変。 一旦ピンセットで近くに置き、それを指で掴んで sdCardの当たる感覚でソケットの位置を探る などして挿入していた。

で、作ったのが、この治具。 2DのCAD、鍋CADで設計した後、 Fusion360に入力。 STLファイルを Qidi Printで開き、gcodeに変換後 LANでX-smartの転送、プリントする。 モノが小さいので10分ほどでプリントできる。
スリット幅の間違と、かみ合わせの調整で 2回作り直し、3回目で使えるものができた。



3Dプリンタと言えば、以前 MakerBot社のThing-O-Matick kitことTOMを 持っていた。 2011年、8年前のことだ。 前のBlogにいろいろ書いている。
結局、使わなくなって、学生サークルに寄付してしまった。
その後、結構安く完成品が手に入るようになり、いつかは 手を出そうと考えていたが、 松本圭司氏の 初めての方向け、3Dプリンター生活のはじめ方を読み、 一気に欲しくなった。
しかし、調べてみると、おすすめの X-Smartが品薄だったり、 20kg前後と重かったり、置き場所をどうする とか考えているうちに、気が削がれてしまっていた。
で、先日、ふとAmazonを見ると X-Smartの在庫がある。 置き場所も、フライス盤を置いていた台が 空いている、今買えばGW遊べる、ということで 購入。日曜日届いた。

厳重な梱包を解き、付属のPLAのリールをセットすると、 電源をいれるだけで使える。 なんか、よくできていて、正面のLCDパネルだけでなんでも できる。家電みたいだ。 付属のUSBのテストデータを印刷、1時間ほどかかったが 無事印刷できた。
さぁ次は、自分でデータを作ってプリントせねば。 とりあえず fusion360の無償版をダウンロードし、 愛好者として登録、サインアップする。 無料で使っていいとは、AutoDesk様は太っ腹だ。
とりあえず、プリントしたいものが数点ある。 その後は、歯車とかリンクとか機構ものを 作っていきたいと思っている。