|
|
写真日記
リンク集
旧コンテンツ
News,( US, UK)
はてなアンテナ
wikipedia
kick4wiki
kick4bbs
ジャパンネット銀行
ピンポイント天気
postMap
G-Tools
Kumaduino
うだうだ日記Index
2011
2010
2009
2008
2007
2006
2005
2004
2003
2002
2001
2000
うだうだ日記 2011年 4月11日
2011年4月11日 月曜日
六足ロボット(組立)
サーボには可動範囲があるので、 サーボの位置が決まらないと組立が出来ない。 Kumaduinoで作った18CH サーボ・インターフェースが完成し、 簡単なソフトもできたので、 足の組立を行う。 全部のサーボを少しだけ同時に動かすプログラムを作成し 試してみると予想通り、CPUにリセットがかかってしまう。 この時の電源電圧の変化を見てみると、 50mSぐらいの間2Vほど電圧が下がっている。 ちなみに電源はALINCOのDM-330MV,最大30Aのやつ。 電源のメータが一瞬4Aぐらいまで振れている。 こんなこともあろうかと、kumaduinoではダイオードとコンデンサで 外部電力の低下をキャンセルする回路が入っているのだが、 100uFでは足りなかったようだ。470uFに変更するとリセットはかからなく なった。 保管状態でサーボに力が加わっていると壊れそうで不安なので、 とりあえず真鍮の角柱で支えてやる。 実験と保管用に保持する台を作成する予定。
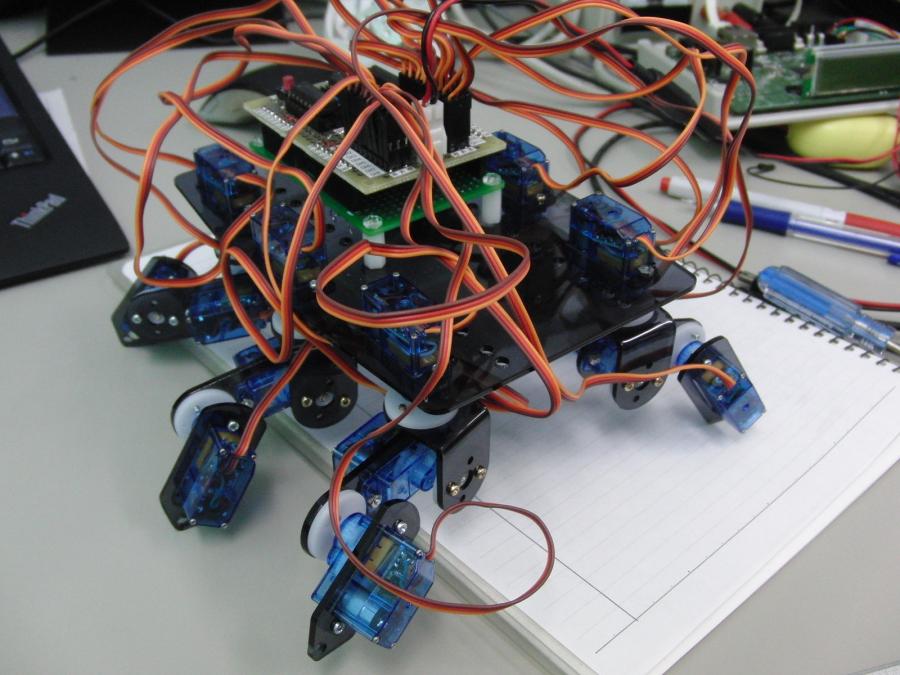 6足で立つ
6足で立つ
|
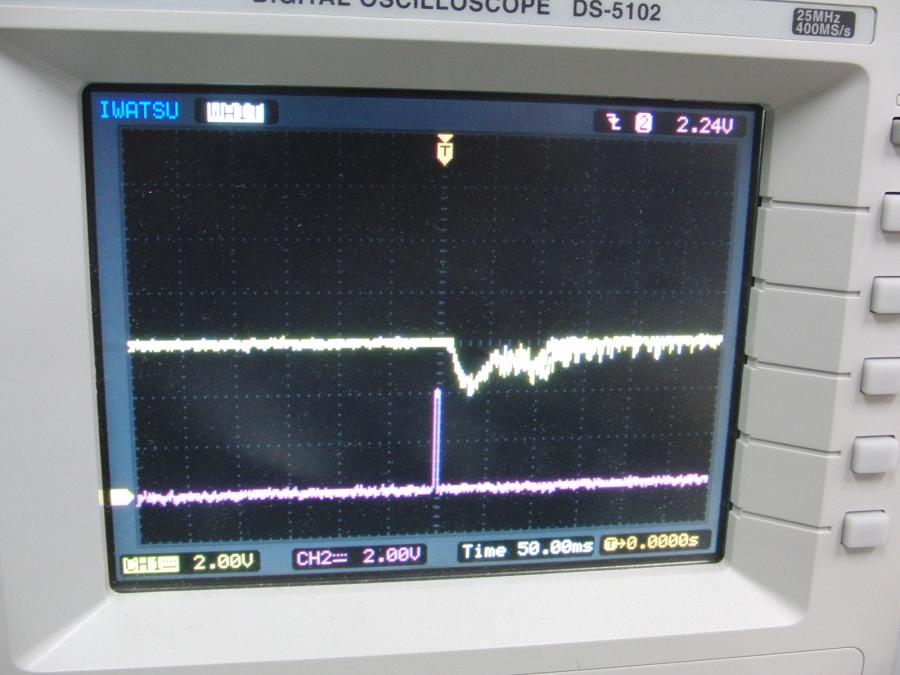 電源電圧の変化
電源電圧の変化
|
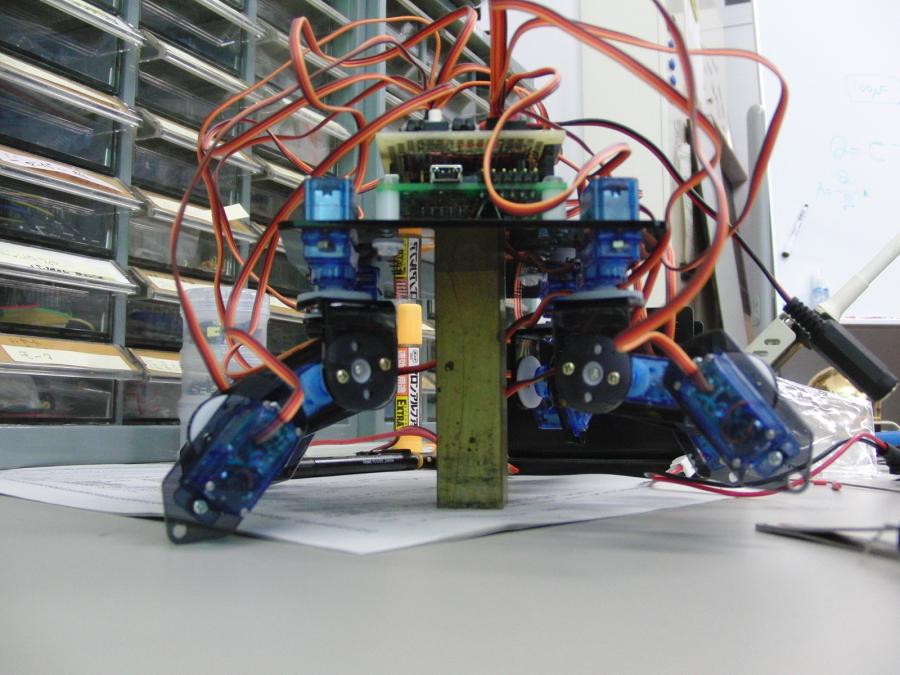 支えて保管
支えて保管
|