|
|
写真日記
リンク集
旧コンテンツ
News,( US, UK)
はてなアンテナ
wikipedia
kick4wiki
kick4bbs
ジャパンネット銀行
ピンポイント天気
postMap
G-Tools
Kumaduino
うだうだ日記Index
2011
2010
2009
2008
2007
2006
2005
2004
2003
2002
2001
2000
うだうだ日記 2011年 4月18日
2011年4月18日 月曜日
六足ロボット(作業・保管用ベース)
6足ロボットを保持する台を製作した。 ロボットのアクリル板を載せる部分はDINレールを切断、 下の台は50mm×6mmの鉄の平板で製作。 φ10の快削の丸棒で100mm高のスペーサを作成、両端にM5のネジを切り 組み立てた物。 鉄の平板の下には、ネジの出っ張りをカバーするため、ゴム足が4個つい ている。
 自宅で加工した部品
自宅で加工した部品
|
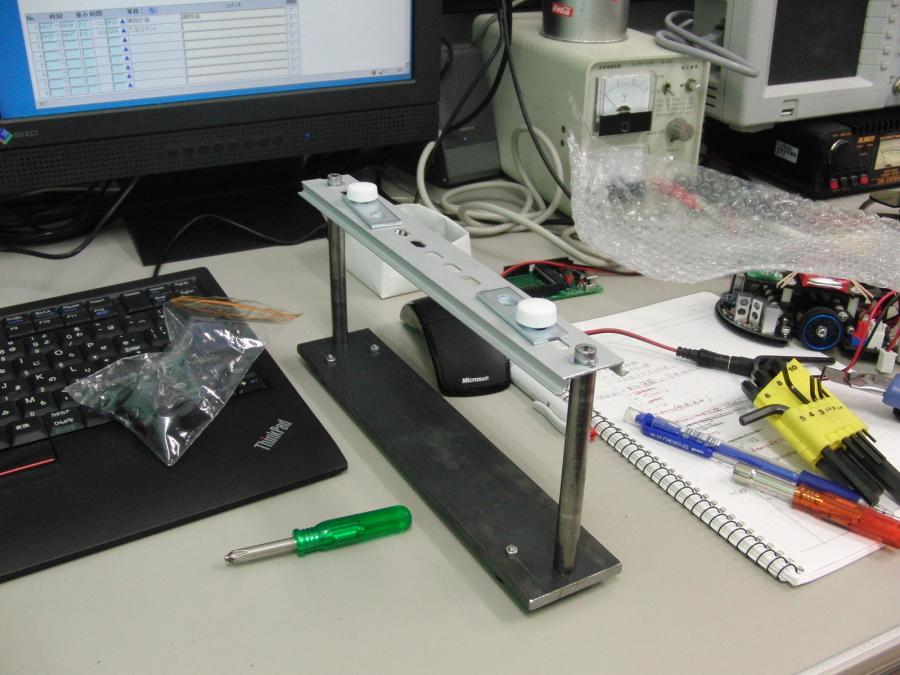 組立
組立
|
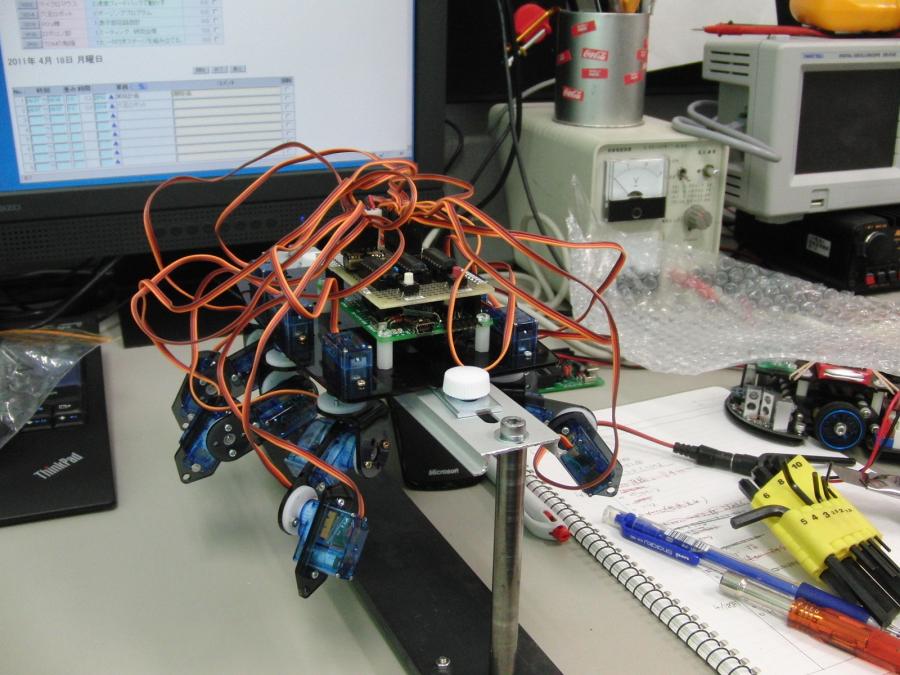 載せた
載せた
|